



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于全轮差动转向的虚拟轨道汽车列车设计
[孙帮成1, 2  , 王文军
, 王文军3 , 刘志明1 , 崔涛4 , 李明高4 ]
, 王文军, 刘志明|
|


第一作者:孙帮成(1963—),男,湖北仙桃人,教授级高工,硕士.研究方向为轨道车辆动力学.email:sunbangcheng@crrcgc.cc.
为提高城市公共交通系统客流运输效率以满足城市居民生活与工作的出行需求,对新型城市客流载运工具结构及其运动控制方法进行研究.首先,综合轨道列车和传统汽车结构优势,提出具有大容量、自导向的虚拟轨道汽车列车架构;然后,对其基本参数和动力驱动方案进行设计,使虚拟轨道列车可灵活运行在复杂的城市空间;接着,提出虚拟轨道汽车列车的差动转向控制方法,以降低虚拟轨道汽车列车驾驶操作难度和实现车辆的自动驾驶功能;最后,搭建了虚拟轨道汽车列车的原理样车,对虚拟轨道汽车列车的差动转向控制方法的效果进行测试.实验结果表明:设计的基于全轮差动转向的虚拟轨道汽车列车控制方法,可控制车辆沿目标路径行驶,提出的具有大容量和自动驾驶功能的虚拟轨道汽车列车可运行于空间有限的城市道路,为城市公共交通车辆的开发提供参考.
In order to improve the passenger transport efficiency of the urban public transportation system and meet the travel demand of urban residents in life and work, the structure of a new urban passenger transport vehicle and its movement control method are studied. First, the structure of a virtual-rail train-like vehicle with large capacity and self-guidance ability is proposed,which combines the structural advantage of rail train and traditional cars.Then the basic parameters and power drive scheme of the virtual-rail train-like vehicle are designed to realize its flexible movement function in complex urban space.Furthermore, a differential steering control method for this kind of virtual-rail train-like vehicle is proposed to reduce the driving difficulty and realize its automatic driving function. Finally, a theoretical prototype of the virtual rail train is built and the effect of the differential steering control method of the virtual-rail train-like vehicle is tested. The experimental results show that the virtual-rail train-like vehicle control method based on all-wheel differential steering can achieve the control of the vehicle to travel along target route, and the proposed virtual-rail train-like vehicle with large capacity and automatic driving function can run on urban roads with limited space, providing references for the development of urban public transport vehicle.
随着城市人口的不断增加和城市车辆保有量的上升, 城区交通环境恶化, 拥堵状况日益严重.为满足城市居民日常生活和工作出行对公共交通的要求, 国内外科研人员提出采用城市轨道交通系统[1, 2].但城市轨道交通系统建设成本高, 且很难广泛应用于复杂的城市交通网.为提高现有城市道路基础设施的利用率, 降低基础设施建设成本, 国内外汽车技术研究人员对车辆结构进行改进, 一般通过增加车辆长度、采用双层车厢结构或增加车辆车厢数量提高车辆单程乘客运输量[3].
通过增加车身长度可以在一定程度上提高车辆的载客量, 但是载客量的提升空间有限, 因随着车身长度的增加, 车辆行驶灵活度下降.而采用双层车厢结构的车辆, 因车辆重心位置上移, 降低了该车型的行驶稳定性, 且载客量的提升空间有限.通过增加车辆的车厢数量, 可以有效提高车辆的单程载客数量, 文献[4, 5]研究指出, 相比传统汽车, 采用多铰接式的汽车列车可降低30%的能源消耗及40%的道路磨损.因此, 法国Lohr公司推出了Trasnlohr电车, 该车型使用铺在地面上的钢轨实现导向, 使用橡胶轮胎实现车辆承载和驱动.我国天津滨海新区和上海浦东新区张江地区相继开通了胶轮导向电车Translohr运营线路[6].荷兰VDL集团推出长24 m的双铰接汽车列车— — Phileas, 德国弗劳恩霍夫交通与基础设施系统研究所推出具有双铰接三节车厢的车辆— — FraunHofer[7].汽车列车虽可有效提高单程乘客运载量, 但随着汽车列车长度的增加, 车辆灵活度下降; 随着汽车列车的自由度增多, 车辆的控制难度增加, 限制了车辆在现有城市交通系统中的广泛应用.为提高汽车列车的实用性, 国内外学者对汽车列车的控制技术进行了研究:Sampei[8]和Tanaka[9]等分别采用模糊控制理论和非线性控制理论, 对单铰接车辆路线跟踪进行控制; Bolzern等[10]采用输入-输出线性化方法对汽车列车进行转向控制; Astolfi等[11]采用李雅普诺夫函数法, 对汽车列车进行直线和圆弧路线跟踪控制; Bruin等[12]采用后退控制方法控制汽车列车侧向运动; Hiroaki等[13]基于李雅普诺夫第二法, 设计了三轴可主动转向的五轴汽车列车的路径跟踪控制方法; Sebastian等[14]设计1种双铰接汽车列车, 并提出了车辆转向控制律; Quintero-Alvarez[15]、Ghilardelli[16]、Rimmer[17]等对汽车列车给定始点和终点的路径进行设计.以上控制方法对车辆长度和自由度有限制, 且都依赖于特定的汽车列车架构.
为了能在复杂城市路网环境下实现大客流量运输, 需借鉴并综合传统城市公交系统和轨道交通的优点, 对车辆结构进行创新.本文作者借鉴劳尔电车的设计, 提出一种兼顾轨道交通和道路交通车辆优势的模块化多铰接虚拟轨道汽车列车架构, 并采用已广泛应用于智能机器人领域的差速转向技术简化虚拟轨道列车转向机构, 然后, 基于差速转向方式设计虚拟轨道汽车列车循迹控制方法, 使虚拟轨道汽车列车沿目标路线行驶; 最后, 通过原型样车行驶实验验证以上方案的可行性.
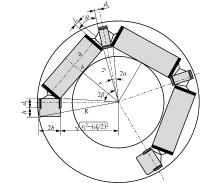
借鉴劳尔电车的架构设计, 将车桥以车间模块的形式布置在相邻两个车体之间.所有车轮利用轮边或轮毂电机分布式驱动, 通过对左右两侧驱动电机的转矩分配控制, 实现车桥整体的转向动作, 配合虚拟轨道和相应的传感器, 使车辆可沿目标轨迹行驶.图1以4车轴3车体编组为例给出多铰接虚拟轨道汽车列车的架构示意图.
 | 图1 多铰接虚拟轨道汽车列车架构示意图Fig.1 Structure of multi-articulated virtual-rail train-like vehicle |
以4轴3车体编组列车为例, 设每节车体长为
式中:
中国标准GB 1589— 2016[18]规定“ 整体封闭式厢式汽车列车, 以及车长大于11 m的客车, 车宽最大限值为2.550 m” , 国内各厂家生产的铰接客车车宽都取此最大尺寸, 所以按
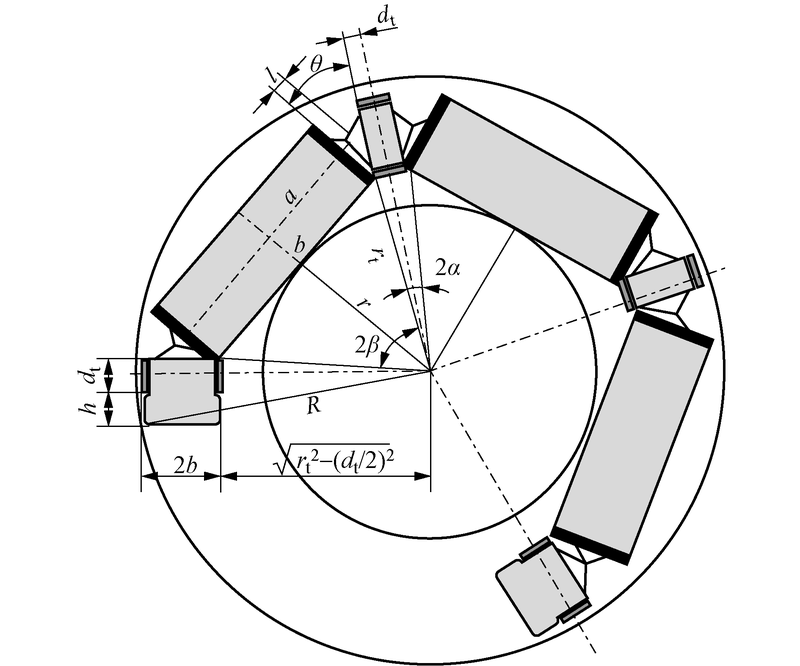 | 图2 最小通道圆Fig.2 Minimum circular path |
由图2可知铰接机构最大转角为
考虑以尺寸
考虑以车体长
又有
利用以上3式可以由车辆尺寸解出
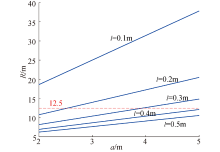
最小通道圆外圆尺寸受到车头模块尺寸的影响, 车头模块的外侧拐角点落在通道圆外圆上, 圆心距内侧轮胎距离为
图 3为
 | 图3 R与a的关系曲线Fig.3 Relation between |
为使动力传动系统结构简化, 并尽量扩大车内低地板乘客空间, 同时发挥电驱动在节能减排等方面的优势, 在样车开发过程中制定了分布式轮毂电机全轮驱动的技术方案.各车桥都可以通过两侧驱动电机差动控制实行转向动作, 车间模块集承载、驱动和转向功能于一体.
由于采用轮毂电机作为汽车列车行驶动力, 需对电机功率的最低要求进行估算.参考国内双铰接BRT车辆的代表车型青年JNP6250G, 3车铰接编组最大总质量38 540 kg, 估算3车厢铰接编组满载质量约为40 t.额定功率下在水平道路以目标车速70 km/h均速行驶, 考虑滚动阻力和空气阻力, 估算驱动功率
式中:传动效率
在列车架构中, 每个车轴都可以独立地利用改变两侧电机驱动力矩大小的方式实现转向运动.如果通过转向控制, 使各车轴的中心都运行在目标轨迹的正上方, 则可使列车沿目标路径行驶.
为使列车各轴中点沿目标路线行驶, 需对车辆相对于目标路径的位置和姿态进行感知, 因此样车开发过程中需对常用的目标路径感知方法进行分析.
目前, 常用的感知方法有基于差分GPS技术的车辆位置感知方法、基于机器视觉的车道线识别与车辆位置感知方法、基于磁信号的车辆位置感知方法.对3种车辆位置感知方法的特点简述为:①差分GPS技术, 用户接收机通过GPS数据和基准站数据进行差分定位, 实现厘米级的精确定位.该方法定位精度高, 但定位精度受环境因素影响较大.②基于机器视觉的车道线识别方案利用摄像头采集道路图像, 通过图像处理得出自车与车道线的相对距离.该方法使用成本低, 缺点是定位精度易受光照强度和天气条件的影响.③磁信号导航通过检测周围所产生的交变磁场确定道路与列车的相对位置和行驶路线, 该方法不受天气条件影响, 但磁标埋设和维护成本较高[19].
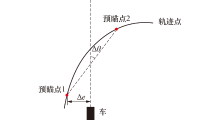
车道保持技术通过传感器获得的车辆与目标路径的偏差, 根据位置和方位角偏差采用线性反馈计算车轮转向角, 实现车辆对目标路线的跟踪任务.在汽车领域广泛采用的车道保持控制方法, 一般实时选择近处和远处2个预瞄点以提高路径跟踪的稳定性和鲁棒性, 见图4.
 | 图4 车道保持控制Fig.4 Lane-keeping control |
车辆通过在差分GPS导航或车道线识方法, 实时获取前方道路信息, 并选取2个预瞄点, 计算车辆的横向偏差
式中, 控制参数横向和角度偏差反馈增益
为验证式(9)所示路径跟踪控制算法的有效性, 试制了如图5所示的双轮毂电机差动转向模块进行基于差动转向的路径跟踪功能测试.
 | 图5 差动转向模块原理样机Fig.5 Theoretical prototype of differential steering module |
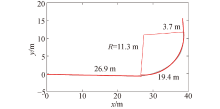
考虑开发多轴列车工程化样车时零部件的通用性, 差动转向模块构架左右两侧各配置1个40 kW的直流无刷电机, 两侧电机分别嵌入到两侧车轮的轮辋内部空间.同时, 安装1个万向轮作为第3点支撑, 以保持差动转向模块在俯仰自由度的稳定.差动转向模块装载蓄电池组作为能量源, 同时装有单片机控制器和目标路线感知设备.差动转向模块的循迹功能测试路段为水泥路面, 长度约为50 m, 见图6, 测试路线由长26.9 m的直线、19.4 m的圆弧及3.7 m的直线组成.
 | 图6 差动转向模块测试用目标路径Fig.6 Target route for the differential steering module test |
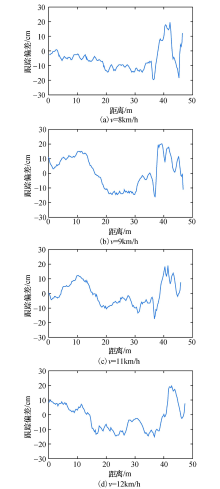
分别利用差分GPS、车道线识别和磁标导航3种目标路线感知方法做了低速(最高测试车速为12 km/h)行驶的循迹控制试验.由测试结果可知, 基于差分GPS定位的差动转向模块目标路径跟踪控制方法89%的横向偏差± 15 cm以内, 94%的横向偏差在± 20 cm以内; 基于车道线识别的差动转向模块路径跟踪控制, 在直线路径上的横向偏差在± 15 cm以内, 但由于视觉系统对小半径曲线车道线的识别效果和拟合性能欠佳, 弯道行驶时原理样机侧向运动的波动较大, 最大循迹偏差达到30 cm; 基于磁标导航的路径跟踪试验, 由于传感器安装位置的限制, 基本无法实现有效的预瞄控制, 行驶轨迹波动较大, 直线路径跟随的横向偏差在± 20 cm之内, 弯道行驶时的最大横向偏差达35 cm.
基于以上测试结果, 本文采用3种感知方法同时对目标路径进行感知与自车定位, 优先选择差分GPS信号; 若由于建筑物遮挡等原因得不到良好的GPS定位效果时, 则考虑使用视觉传感器通过车道线识别获得与目标轨迹的偏差信息; 若由于光照条件影响使得车道线识别效果不佳, 则用磁标识别信号代替.图7为采用差分GPS、机器视觉车道线识别模块和磁标导航模块的信号进行多传感器融合后的路径跟踪横向偏差.
 | 图7 目标路径跟踪误差Fig.7 Tracking error of targetroute tracking error |
由图7可知, 在路线跟踪过程中, 反馈量是以较精准的偏差量为主, 差动转向模块以不同速度行驶时, 在对直道路径跟踪时的横向偏差均在± 15 cm以内, 对弧形路线进行跟踪时的横向偏差也可控制在± 20 cm以内, 达到了较为理想的控制效果.
在虚拟轨道列车循迹功能测试之前, 先采用数字建模软件Simpack对虚拟轨道列车的测试平台— — 原理样车进行设计, 设计的原理样车系统如图8所示.图8中的原理样机主要包括基本底盘结构、感知模块和控制模块3部分:基本底盘结构由车体构架、铰接模块、轮胎组成; 感知模块包括差分GPS设备、磁导航传感设备、摄像头及信号处理设备、拉绳传感器等; 控制模块主要由iDp控制器和电池组组成.原理样机利用拉绳传感器测量各车桥相对于车体构架的转角, 构成下位角度反馈伺服控制, 同时通过差分GPS、摄像头车道线识别模块或磁导航传感器感知第1节车体相对于目标路径的偏差, 实时将偏差发送至各车桥控制器, 控制器根据偏差计算并发出转向角指令信号, 改变车辆的位置和姿态, 形成路径跟踪偏差反馈控制; 后续车体相对于目标轨迹的偏差通过车体时间转角的测量间接换算得到.
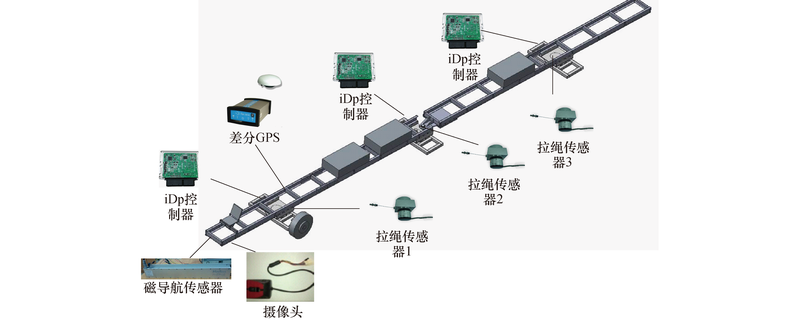 | 图8 虚拟轨道汽车列车的原理样车系统Fig.8 Theoretical prototype system of virtual-rail train-like vehicle |
差动转向循迹行驶功能在差动转向模块试验中得到验证之后, 试制了虚拟轨道汽车列车的原理样车, 如图9所示.
 | 图9 虚拟轨道汽车列车的原理样车Fig.9 Theoretical prototype of virtual-rail train-like vehicle |
原理样车的车体构架与车桥间通过转盘轴承连接, 车桥利用两侧轮毂电机的差动转矩进行转向; 各车体构架通过关节轴承连接, 容许相邻车架间3自由度的相对运动; 另外, 还设计了1个车间模块, 对驱动电机、空气悬架、铰接结构等方面工程实现的可行性进行了探索.原理样车上安装了差分GPS、车道线识别摄像头、磁标识别传感器3种感知设备, 同时对目标路径进行感知, 并对车桥转角和相邻车体构架之间的转角进行测量.
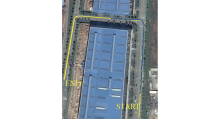
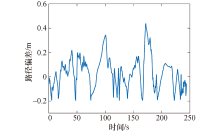
虚拟轨道列车自动循迹功能采用原理样车为测试平台进行测试.原理样车路径跟踪功能测试在如图10所示的厂区内道路进行, 图中黄色线为预先沿车道中心线采集的目标轨迹, 蓝线为原理样车在路径跟踪过程中的实际行驶路径.在路径跟踪控制测试试验过程中, 汽车列车在直线区间行驶时的速度约10 km/h, 在路口转弯时速度降为约6 km/h, 实际路径跟踪偏差如图11所示.
 | 图10 测试路线Fig.10 Test path |
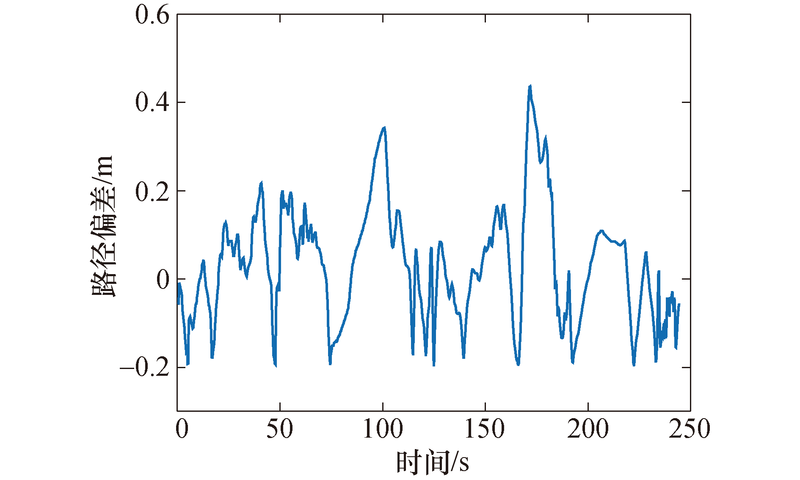 | 图11 路径跟踪偏差Fig.11 Path-tracking deviation |
图11中, 0~100 s时原理样车跟踪图10所示的直线路线, 路径跟踪偏差基本在± 20 cm之间, 100~180 s时, 原理样车以约6 km/h的速度跟踪圆弧路线, 在跟踪圆形路线时, 路径跟踪偏差基本在-20~40 cm之间, 由此可知虚拟轨道列车的原理样车可以很好地跟踪目标路径, 并沿目标路径行驶.
本文介绍了从汽车列车架构设计到原理样车循迹功能测试的研发过程, 得到如下结论:
1)全轮差动转向多铰接汽车列车的架构设计在原理上是可行的, 能够适应城市道路交叉路口等小半径的曲线道路.
2)基于轮毂电机的差动转向控制可实现目标路径跟踪, 由车桥转向角控制器与整车控制器构成的级联循迹控制, 可以实现铰接列车的多轴目标路径跟踪.
3)路面凸起或凹陷导致汽车列车轮胎受到的地面阻力差异较大, 地面阻力差异将会影响汽车列车的行驶稳定性, 直接影响汽车列车的路径跟踪效果, 后续研究将对地面阻力在线辨识方法进行研究, 并对控制方法进行完善.
4)通过原理样车低速行驶循迹试验, 验证了汽车列车自动循迹的可行性, 当汽车列车高速行驶时, 动力学特性显著, 对汽车列车高速行驶时的动力学特性及循迹控制方法的探讨将是进一步研究的方向.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|