{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
轻型柔顺机械臂结构设计与控制
[赵洪福 , 张秀丽]
, 张秀丽]
, 张秀丽]
|
|


第一作者:赵洪福(1989—),男,山东济南人,硕士. 研究方向为生物仿生机器人.email:hongfuzhao@lusterinc.com.
为了使机械臂具有较好的位置跟随性和人机交互时的安全性,设计了一款3DOF的轻型柔顺机械臂.采用碳纤维材料实现轻量化,设计了串联弹性驱动器(SEA)实现机械臂结构的柔顺性.建立了3DOF轻型柔顺机械臂的运动学和动力学模型,并求解了工作空间;设计机械臂的位置控制实验,通过MTI位姿传感器来获取机械臂末端位姿,提出了MTI位置误差修正的方法.实验表明:当机械臂处于自由状态时,通过对比机械臂各关节和MTI末端位置的跟随性能,得知1,2,3各关节的位置跟随误差分别为7%,5%,2%,末端 X,Y,Z 3个方向的最大位置误差分别为19.25%,14.43%,6.4%,证明该机械臂末端具有较好的位置跟随性.
A lightweight compliant robotic arm with 3DOF is designed to make the robot arm have better position tracking performance and human-robot interaction security. Using carbon fiber material to achieve lightweight,a series elastic actuator (SEA) is designed to realize the structural compliance of the robotic arm. The kinematic model and dynamic model are set up for the lightweight compliant 3DOF robotic arm. The work space of the robotic arm is computed based on its kinematic model.The position control experiment of the robotic arm is designed. The position and pose of the robotic arm are obtained by the MTI position sensor, and MTI position errors correction is proposed. By comparing the following performance of the joints of the robotic arm and MTI position,the position following error of the joint 1,2,3 are 7%, 5%, 2%, and the maximum position errors on X,Y,and Z are 19.25%, 14.43%, 6.4%.The results show that the robotic arm reaches a good position tracking performance in free workspace.
传统的机器人在工作中都会定义一个安全工作区, 这使得机器人与外界环境的安全交互成为一个重大难题[1].为保证人与机器人和谐安全相处, 面向人机协作的机器人相继问世.所谓面向人机协作的机器人就是使人与机器人能够安全柔顺的进行交互, 共同协作完成任务.机械臂的轻量化和柔顺化是实现人机交互安全性的重要技术途径.
机械臂的轻量化设计主要通过轻质材料、结构优化实现.目前, 最具有代表性的协作机器人是ABB公司采用镁铝合金材料研制的双臂协作机器人YUMI[2]; 利用钛合金制作并可通过神经移植用肌肉控制的“ Luke Arm” [3]; 文献[4]利用CAE仿真将连接件应力分布云图中应力较小的部位进行掏空; 文献[5]根据ANSYS软件静力学仿真的应力云图, 对结构设计不合理的地方做出减重优化.
机械臂的结构柔顺化设计以关节驱动系统的柔顺化为主, 即, 通过将柔顺驱动元件或材料引入关节中, 构成串联弹性驱动器(SEA), 实现驱动以及传动系统的柔顺化.文献[6]设计了由内圆盘和外圆盘及弹性片构成的扭转弹簧作为关节输入输出之间的弹性元件; 文献[7]设计了由内圈、外圈和中间的薄壁状弹性片构成的弹性元件和采用蜗轮蜗杆传动方式的扭转弹性驱动器; 文献[8]设计了由六个线性弹簧实现旋转输出的柔顺单元.
然而, 在我国将SEA应用于机械臂中的研究刚起步, 现有的机械臂研究很少兼顾轻型与柔顺性两个方面, 且多采用控制方式实现柔顺性, 对结构柔顺的研究较少.上述结构柔顺化的设计复杂, 加工制作成本高, 可替换性较差.所以, 对机械臂的轻量化和柔顺化的研究具有重要的现实意义和学术价值.
本文作者设计了一款以线性弹簧为基础的新型串联弹性驱动器, 应用于3自由度的机械臂, 推导了机械臂的运动学和动力学模型, 通过分析确定了SEA的弹簧参数, 搭建控制系统, 提出了一种MTI位置修正的方法, 并通过实验验证机械臂的位置跟随性能.
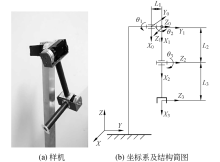
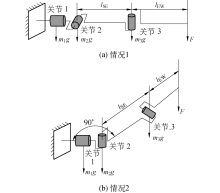
机械臂关节的自由度配置方式关系到机械臂灵活性和可操作性能, 因此合理的配置机械臂关节的自由度至关重要.根据文献[9]和文献[10]对仿人机器人机械臂的构型的研究, 当肩、肘关节的自由度为“ 横滚俯仰偏航-俯仰” 和“ 偏航俯仰横滚-俯仰” 配置时, 仿人机械臂的运动更灵活, 更稳定.由于横滚和偏航方向的运动可以通过俯仰旋转90° 来实现变换, 为简化模型, 采用一个俯仰加一个横滚自由度来实现肩部关节的运动, 肘部关节与肩部关节的俯仰自由度相一致.为实现轻量化的设计, 大臂、小臂由碳纤维管构成, 其他部件采用铝合金材料.机械臂的尺寸则根据中国成年人人体尺寸[11]第50百分位的数据点来确定.机械臂的构型和参数见图1和表1.
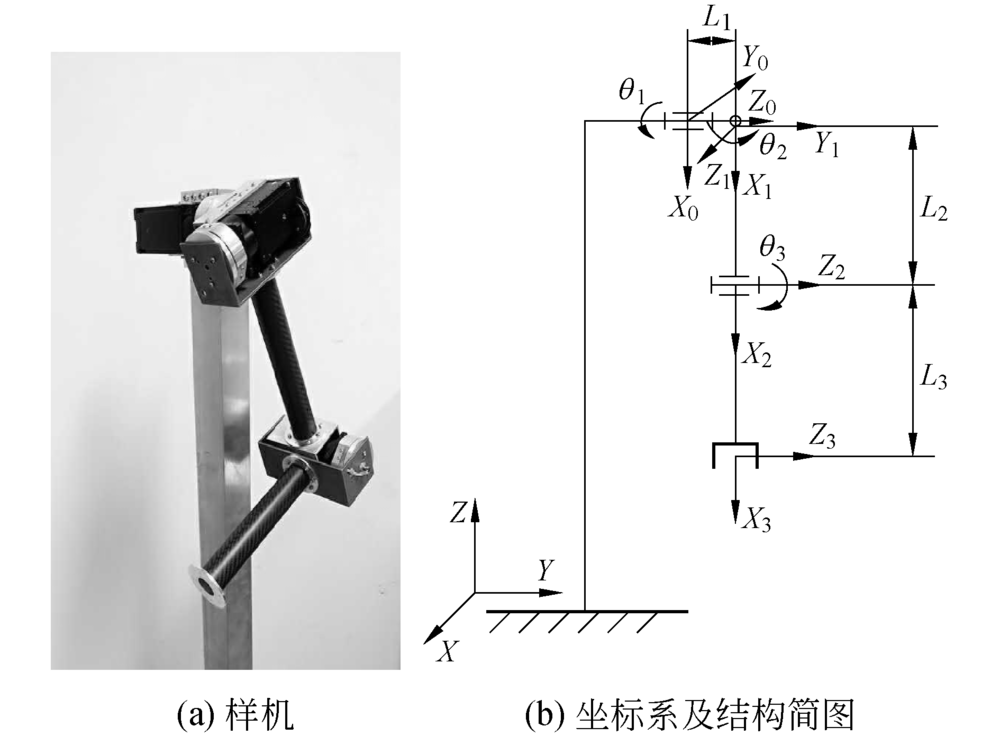 | 图1 机械臂样机及结构简图Fig.1 Prototype and structure of the robotic arm |
| 表1 机械臂样机参数 Tab.1 Prototype parameters of the robotic arm |
根据图1(b)所建立的3自由度机械臂连杆坐标系, 得到在该坐标系下的D-H参数如表2所示.
| 表2 D-H参数表 Tab.2 D-H parameters |
运用D-H法建立运动学模型, 求得机械臂末端手腕的位姿矩阵为
式中:
给定机械臂手部的期望位姿如下:
令机械臂末端位姿和期望位姿相等, 运用运动学逆解方法求解, 得机械臂运动学逆解见式(2).
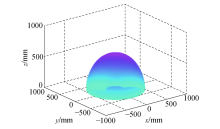
以表1中人体手臂主要关节活动角度范围作为样机的关节角度, 采用Matlab编程运行, 绘制出机械臂仿人运动的有效工作空间, 其形状是半径为559 mm的半圆球, 如图2所示.
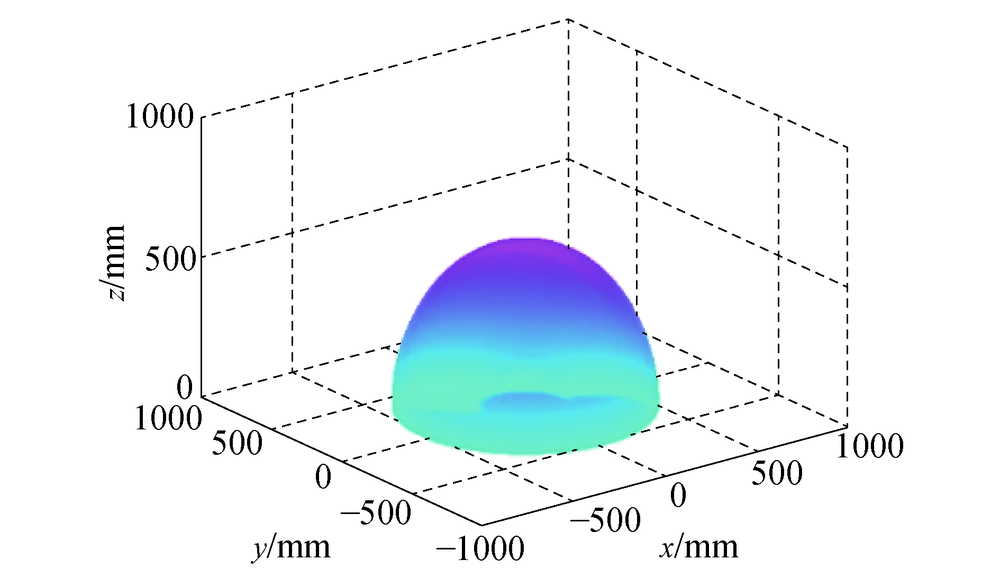 | 图2 机械臂有效工作空间Fig.2 Effective work space of robotic arm |
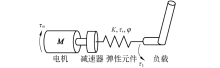
动力学建模的目的是研究作用于物体的力与物体运动的关系.通过动力学正解可以由关节的驱动力或者驱动力矩得到机械臂的运动, 包括位置
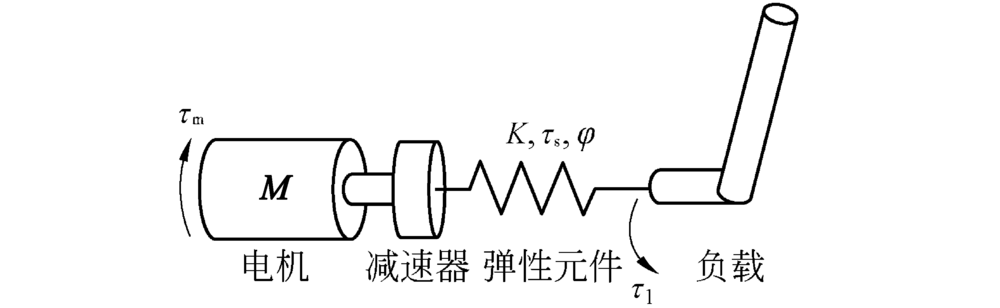 | 图3 机械臂关节结构模型Fig.3 Joint structure model of robotic arm |
图3中,
式中:
根据柔顺机械臂的动力学方程, 考虑机械臂的外部负载, 可以计算出驱动器所需的力和力矩.
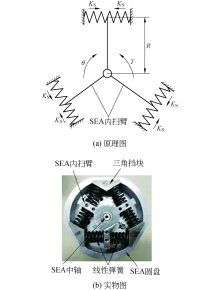
根据图3, 需要在电机与输出负载之间安装弹性元件, 作为机械臂结构中的柔性单元, 以实现从驱动到负载和从负载到驱动的柔顺.考虑到弹性元件的成本和可替换性, 对SEA内部的弹性元件选用3组线性弹簧环绕分布, 其基本原理和实物见图4.
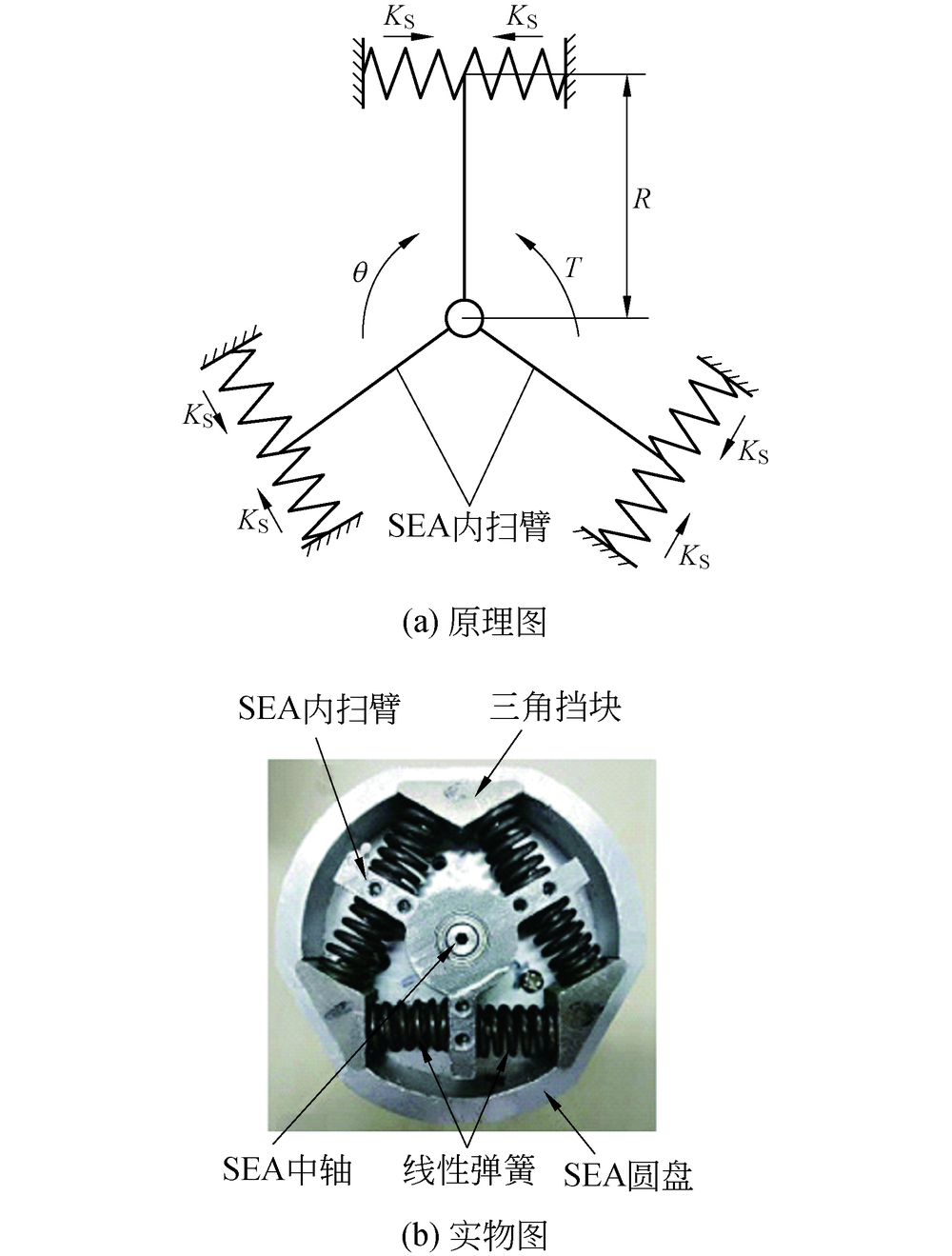 | 图4 SEA模块Fig.4 SEA Modular |
图4中,
机械臂静力学分析如图5所示.其中:机械臂各关节重量为
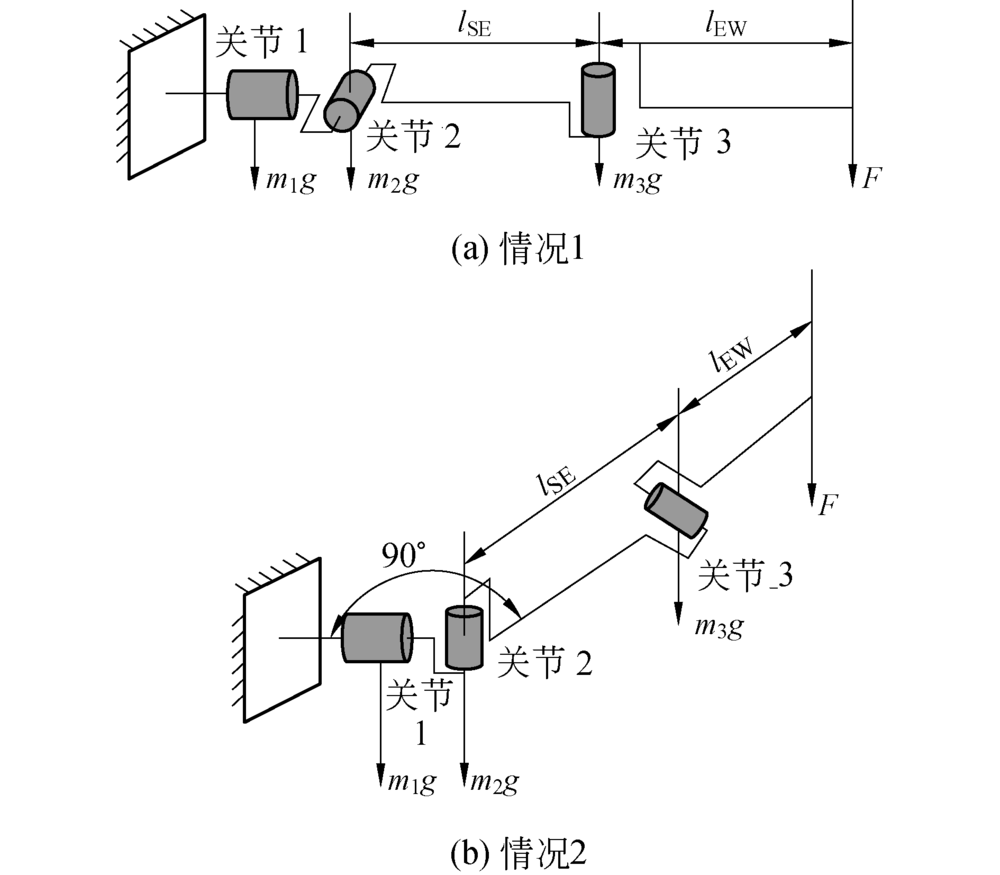 | 图5 机械臂静力学分析Fig. 5 Static analysis of robotic arm |
为了计算弹簧刚度, 设定初始条件:末端施加F=10 N的负载力, 关节部位SEA发生角度为
求解图5两种情况下关节所受静力学力矩得
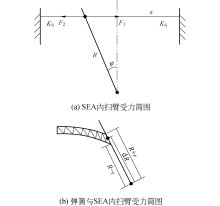
串联弹性驱动器SEA中, SEA内扫臂及弹簧与SEA内扫臂接触受力如图6所示, 由于SEA内扫臂旋转造成的弹簧轴线的偏移角度很小, 假设弹簧对扫臂产生的压力
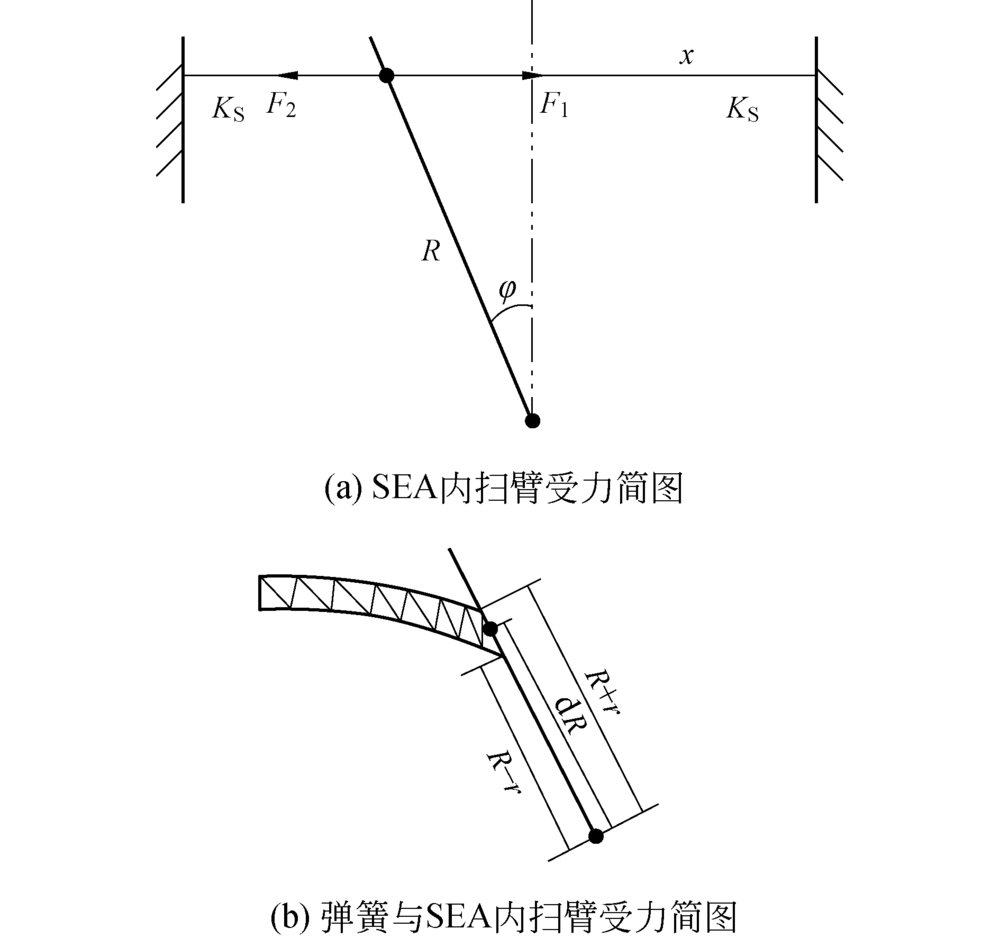 | 图6 弹簧与SEA内扫臂受力示意图Fig.6 Force between the springs and SEA inner arm |
由图6得到弹簧对SEA内扫臂的作用力为
单组弹簧对SEA内扫臂产生的力矩为
其中:
整个关节SEA模块的力矩为
对于每一个关节, 当其所受静力学力矩
式中:
选用碳素弹簧钢丝C级别, 应用弹簧设计方法进行求解计算, 最终求得各关节SEA模块中的弹簧参数, 如表3所示.
| 表3 各关节SEA模块弹簧参数 Tab.3 SEA spring parameters of each joint |
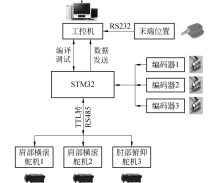
搭建实验平台研究机械臂自由状态下的位置跟随性能, 以验证机械臂设计的合理性.机械臂控制系统框图见图7, 控制系统采用上下位机结构, 上位机为工控机, 主要用于指令发送、数据采集和控制程序编写, 下位机采用微型控制器STM 32, 通过RS 232和J-Link编译器实现上、下位机的通信, STM 32控制器与各关节驱动舵机之间采用RS 485通信, 末端的位置姿态信息采用RS 232传输至上位机.
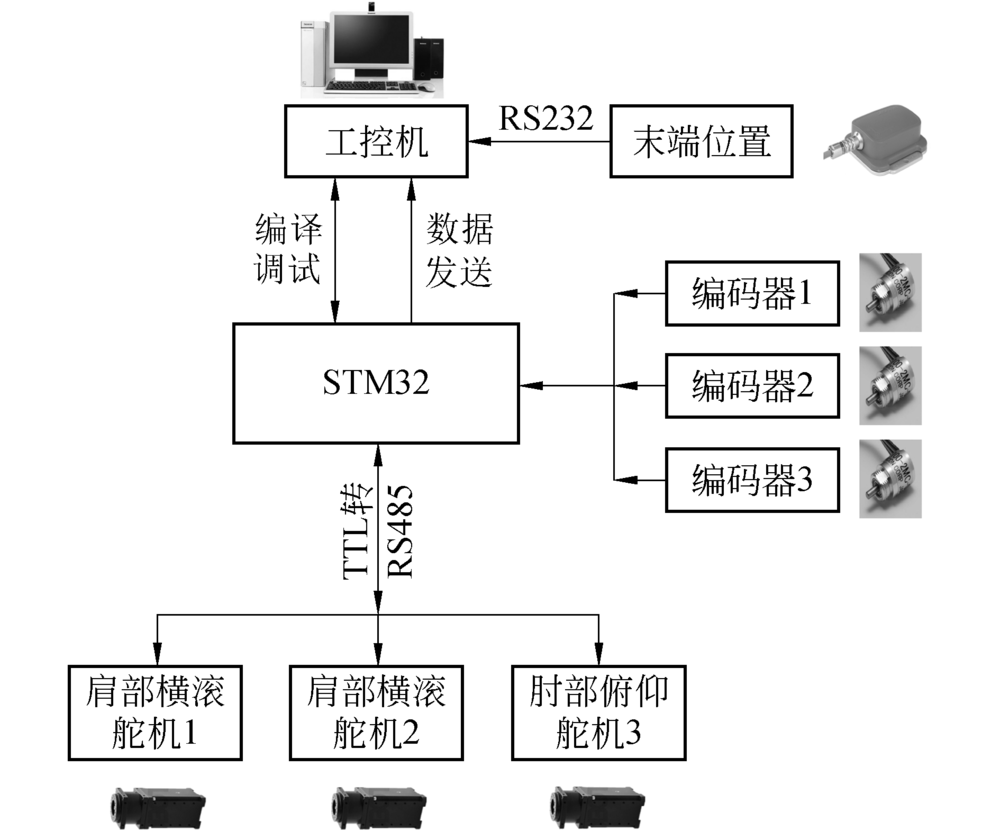 | 图7 机械臂控制系统简图Fig. 7 Control system of robotic arm |
机械臂的驱动电机为韩国ROBOTIS公司Dynamxel PRO系列的工业舵机, 控制精度高, 驱动力矩大.各关节SEA输出位置检测采用NEMICON7S系列的微型编码器.机械臂末端的位置由Xsens公司的微型姿态仪MTI(Motion Tracker Inst rument)进行检测.
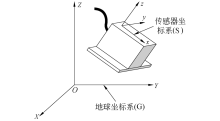
MTI姿态仪是惯性传感器, 能够检测移动对象的三维线加速度、角速度和地球磁场强度, 其输出有欧拉角或四元数两种方式[12].机械臂末端的位置可以根据陀螺仪和加速度计提供的姿态信息和加速度值进行二次积分得到[13].如图8所示, MTI姿态仪的坐标系包括传感器坐标系(S)和笛卡尔地球磁场坐标系(G), MTI计算得到的是S相对于G的方位.
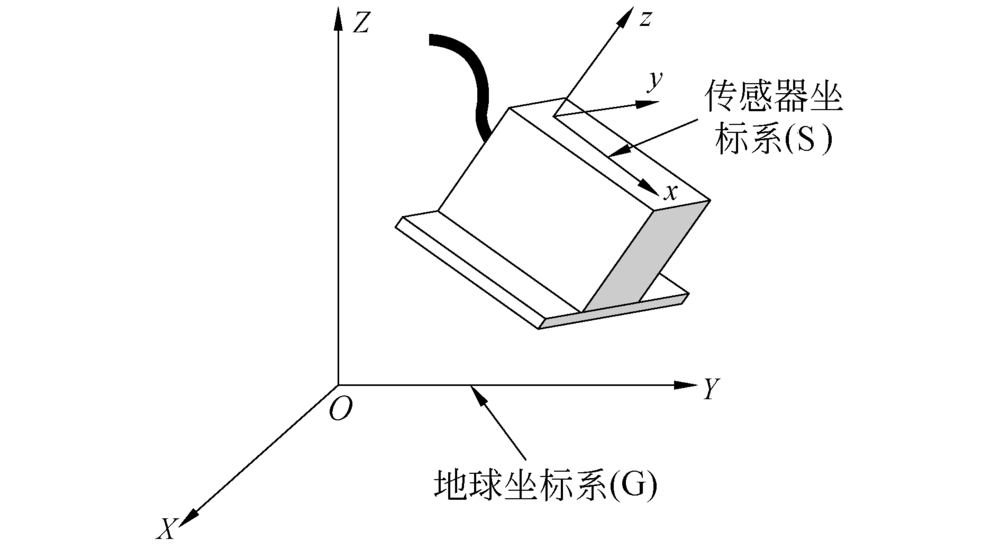 | 图8 MTI系统坐标系Fig. 8 Coordinate system of MTI |
选择MTI的输出模式为四元数, 计算S与G之间的变换矩阵
, 如下
式中:
对
式中:
由于MTI采用的是惯性测量方式, 其在测量过程中存在测量误差, 误差来源包含外界磁场的干扰、MTI自身测量误差、积分求解过程的计算误差.随着时间的推移, 误差将不断的累积增大, 因此需要对测量的数据和积分后得到的数据进行修正, 修正方法步骤如下:1)测量MTI静止状态下的线加速度数据, 并进行积分计算, 得到静止状态下每个周期的位置偏移
式中:
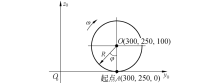
为验证机械臂的位置跟随性, 对机械臂末端的运动轨迹进行规划, 使机械臂执行推平圆运动, 即机械臂末端在
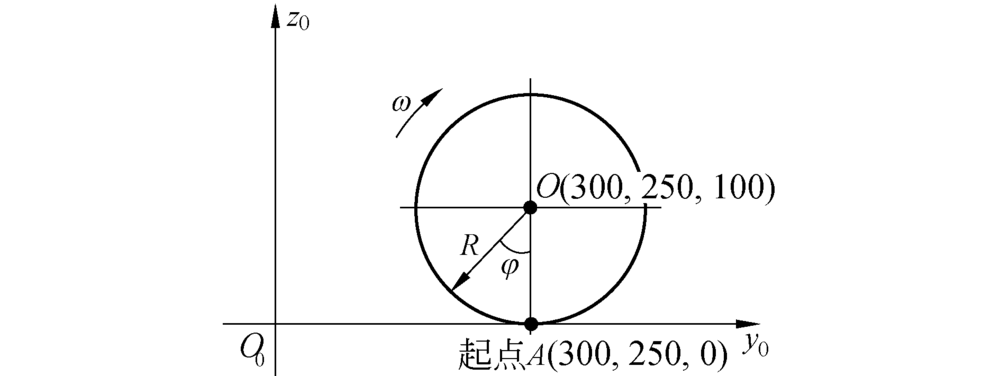 | 图9 平圆运动轨迹Fig. 9 Circular trajectory |
运动轨迹所在的水平面为
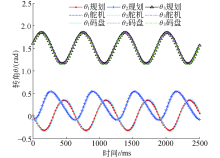
将所规划的平圆运动轨迹写入到控制程序中, 根据各关节舵机反馈的位置信息和采集的编码器数据, 绘制机械臂关节曲线, 见图10.规划的平圆轨迹圆周长
 | 图10 机械臂各关节跟踪性Fig.10 Tracking performance of each joint |
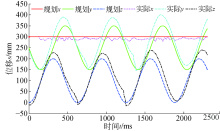
利用MTI传感器积分并修正误差后, 得到机械臂末端在工作空间中的实际运动轨迹, 如图11所示.分析可得,
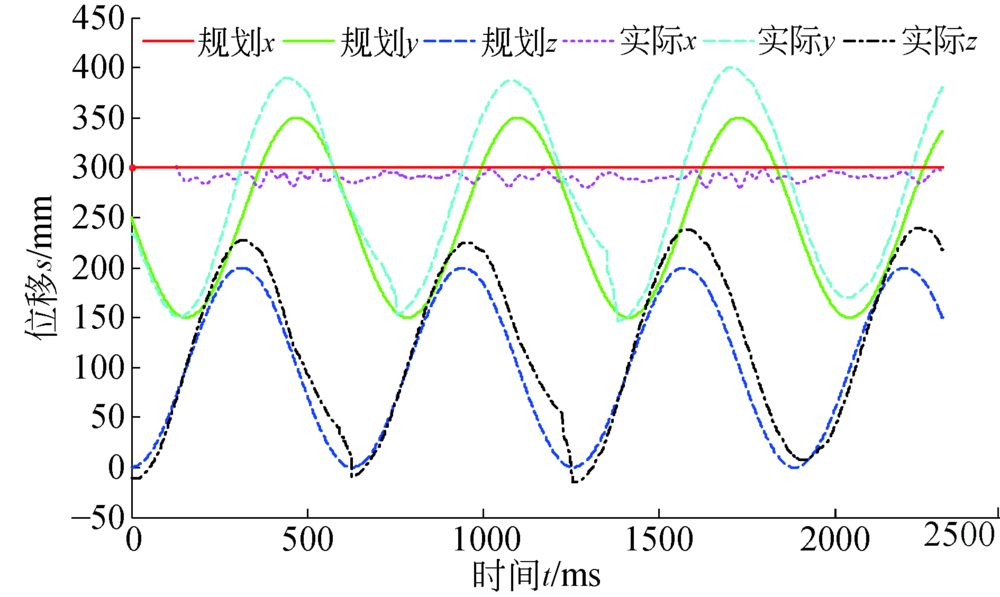 | 图11 机械臂末端运动轨迹Fig. 11 Terminal trajectory of robotic arm |
对比关节空间和工作空间, 关节空间的位置跟随误差明显小于工作空间位置跟随误差, 可知, 机械臂的末端位置跟随误差主要是本周期内MTI传感器漂移所造成的误差累积没有得到及时消除造成的, 解决这个问题需要在将来对MIT传感器的校正方法进行进一步的完善.
实验结果表明:机械臂在做平圆运动时, 具有位置跟随性能.本文采用的SEA相比于传统的控制的柔顺性, 能使其对不可预知碰撞做出更加迅速的反应, 且采用了四元数计算位姿的方法, 比传统的欧拉角更加灵活.
1)设计了一种3自由度的轻型柔顺机械臂, 每个关节部位采用了由线弹簧环绕分布构成的串联弹性驱动器SEA, 实现了柔顺化; 采用碳纤维材料, 实现了轻量化.
2)对机械臂进行了运动学建模, 求解了机械臂的运动工作空间, 并进行了动力学建模, 求解了机械臂各关节的等效驱动力矩; 对关节处的SEA模块进行结构设计和弹簧刚度设计.
3)搭建了机械臂的控制系统, 提出了一种MTI位姿传感器误差修正的方法, 并进行了机械臂位置跟随性能验证实验.结果表明, 机械臂在运动过程中比较平稳, 且具有较好的位置跟随性能.
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|