


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于串联弹性驱动器的并联柔顺手腕的设计
[张秀丽 , 夏旭]
, 夏旭]
, 夏旭]
|
|


第一作者:张秀丽(1975—),女,河南洛阳人,副教授,博士.研究方向为机器人学. email:zhangxl@bjtu.edu.cn
通过分析人体腕关节的组织结构和运动特性,设计了具有柔顺性的3SPS-1S并联机器人手腕机构.3条移动副支链作为驱动,在驱动支链中加入串联弹性驱动器(Series Elastic Actuator,SEA)来实现并联机器人手腕的柔顺性.建立了3SPS-1S并联机构的运动学逆解,推导雅可比矩阵,提出了确定SEA弹簧刚度的方法;基于位置补偿思想,实现柔顺手腕的位姿控制.通过实验验证了该机构对未知负载具有被动柔顺性,通过主动柔顺控制可以实现更高的主动柔顺性.
By analyzing the structure and movement characteristics of the human wrist, 3SPS-1S parallel mechanism is designed as the prototype for the compliant robotic wrist. The series elastic actuator(SEA) is introduced into three moving branch chains which serve as the driving parts to realize the compliance of parallel robotic wrist. The inverse kinematics is established and the Jacobi matrix is deduced based on the 3SPS-1S parallel mechanism and the method of determining the spring stiffness of the SEA module is put forward. Based on the thought of position compensation, the position and pose control of compliant wrist is achieved. Experiments have verified that the robotic wrist has passive compliance for unknown load, and that this robotic wrist can achieve higher active compliance by active compliance control.
机械臂的腕关节对于确定末端执行器的位姿和接触状态具有重要作用, 传统的腕关节每个自由度之间为串联结构, 但是串联机构存在积累误差大、承载能力低等缺点.分析人体手腕的组织结构和运动特性发现, 其具有明显的并联特点, 并联机构相比较串联机构具有结构紧凑、承载能力大等优点, 可弥补串联机构的缺陷, 被广泛应用于机器人的腕关节[1]、肩关节[2]、髋关节[3]以及踝关节康复医疗机器人[4, 5, 6]等.如美国莱斯大学的M. K.O'Malley等[7, 8]设计的用于手臂康复医疗的机电一体和触觉界面(Mecha-tronics and Haptic Interfaces, MAHI)系列机器人, 腕部采用3RPS-1R并联机构实现腕关节的康复医疗.Gan等[9]分析了人体腕部运动, 将3SPS-1S并联机构作为腕关节, 并从理论上验证了其可行性.西班牙马德里理工大学的J.Puglisi等[10]设计了穿针手术机器人, 腕关节采用 3PSS-1S并联机构, 并对该机构进行运动学以及奇异性、工作空间分析, 通过仿真和样机实验验证了奇异位形等.
上述并联机构机器人机构都为刚性, 从而保证了精度、承载能力等要求, 但是刚性结构对于环境的适应性比较差.随着服务机器人、工业机器人的发展, 人们对于人机共融环境下的安全性要求也越来越高, 在人机交互或机器人作业过程中经常出现由于操作失误等因素造成机器人失控的情况, 这将会给人或环境带来伤害, 机械臂的柔顺化设计是解决下一代服务机器人社会应用的一个重要课题.实现柔顺化主要包括两种方式:一是柔顺控制, 即对机器人施加控制策略实现柔顺性.如Rethink Robotics公司的Baxter双臂机器人[11], 美国卡内基梅隆大学的Snake Robot[12]等.另一种是结构柔顺化, 即将弹性材料引入驱动环节.最早由麻省理工学院的人工智能实验室G. A.Pratt等[13]提出的串联弹性驱动器(Series Elastic Actuator, SEA)很好的解决了动力柔顺输出问题, 基本原理就是在驱动器和负载之间添加弹性元件, 使动力输出具有柔顺性.SEA作为一种以电机为基础可以实现可控可调的柔顺输出性能的驱动器, 其结构设计和控制技术成为目前的研究热点, 被广泛应用于医疗康复、服务、人机协作等机器人上.如新加坡国立大学的Yu等[14]设计的SEA模块用于下肢康复医疗, 通过一组扭簧和一组线性弹簧实现较大范围的负载承载能力.美国特拉华大学的Daniel Ragonesi等[15]在WREX儿童肌无力上肢康复机器人基础上, 设计了一款SEA, 很好地解决了由于机器人刚性驱动对患者的二次伤害问题.kyoungchul Kong等[16]设计了紧凑型串联弹性驱动器(cSEA), Derek Leach等[17]设计了多种模式串联弹性驱动器等.国内学者马洪文等[18]提出了多种串联弹性驱动器结构方案, 并对SEA动力学建模方法和输出特性进行仿真研究.调研分析发现, SEA模块虽然是目前国内的研究热点, 但是却鲜有将SEA模块作为并联手腕的柔顺结构的研究.
本文作者将3SPS-1S并联机构作为并联手腕的原型机构, 将电动推杆与弹簧组结合, 设计了一款直线型的双串联弹性驱动器.建立约束方程求解3SPS-1S机构的运动学逆解, 通过速度分析推导雅可比矩阵[5], 提出SEA模块弹簧刚度的确定方法, 搭建三自由度并联柔顺手腕样机(SoftWrist)和控制平台进行刚性和柔性手腕的位姿控制对比实验及被动柔顺与主动柔顺验证实验, 实现并联手腕的柔顺性, 从而提高机械臂的环境适应能力, 保证人机交互的安全性.
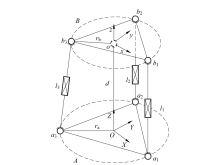
根据人体运动解剖学[19], 腕关节是手臂与手掌的连接, 手掌在桡腕关节处可做伸展/弯曲、外展/内收运动以及在前臂绕桡骨和尺骨的共同轴线做外旋/内旋运动.将3SPS-1S机构作为并联柔顺手腕的原型机构, 该机构有4条支链, 中间为约束支链, 上端通过球面副与动平台连接, 下端与定平台固定连接.其余的3条支链为驱动支链, 对称分布在动平台、定平台的圆周上, 每条驱动支链有2个球面副和1个移动副组成, 上、下端是通过球面副与动平台、定平台连接.运用Kutzbach-Grubler公式对3SPS-1S并联机构进行自由度分析, 该机构具有3个自由度, 满足机械臂腕关节自由度要求.
如图1, 运动坐标系
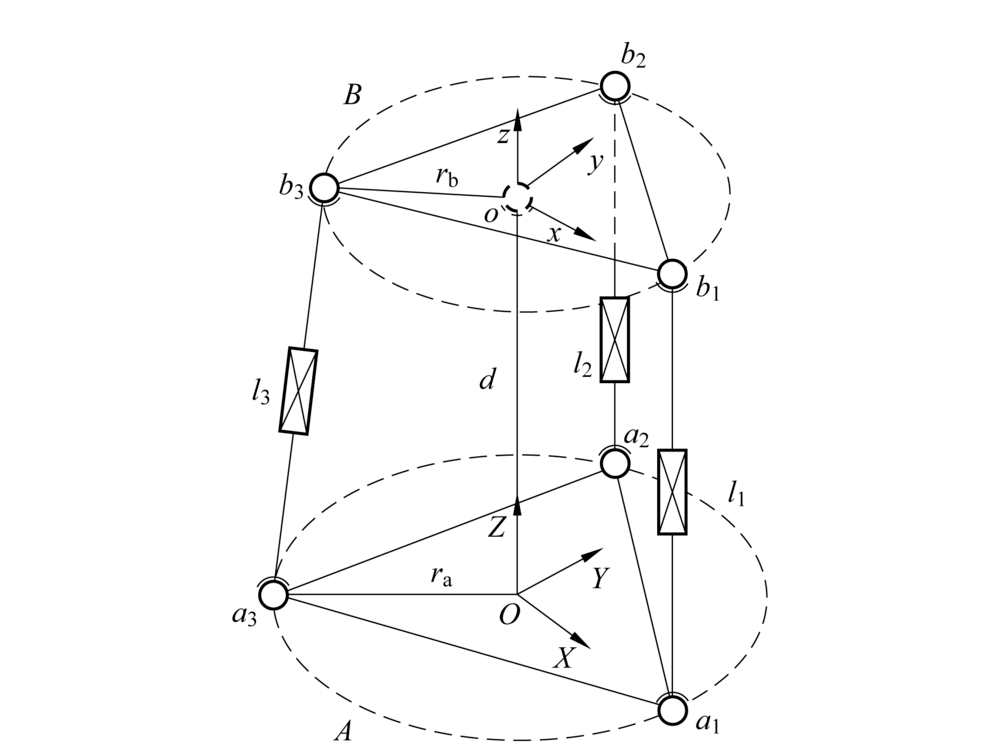 | 图1 3SPS-1S并联机构数学模型Fig.1 Mathematical model of 3SPS-1S parallel mechanism |
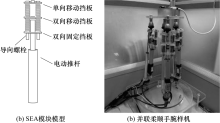
将电动推杆与弹簧组结合, 设计一款直线型双串联线性弹性驱动器作为并联手腕的驱动装置, 实现柔顺化, 弹簧与挡板通过圆形凹槽过盈配合, 螺栓选用的是半螺纹螺栓, 单向移动挡板由于螺栓的作用只能向下移动, 双向移动挡板在电动推杆的驱动下可以上下2个方向移动, 双向固定挡板与螺栓通过螺纹连接, 与螺栓的相对位置保持不变.SEA三维模型以及并联柔顺手腕样机如图2所示, 可实现2种运动模式, 具有双向柔顺性.
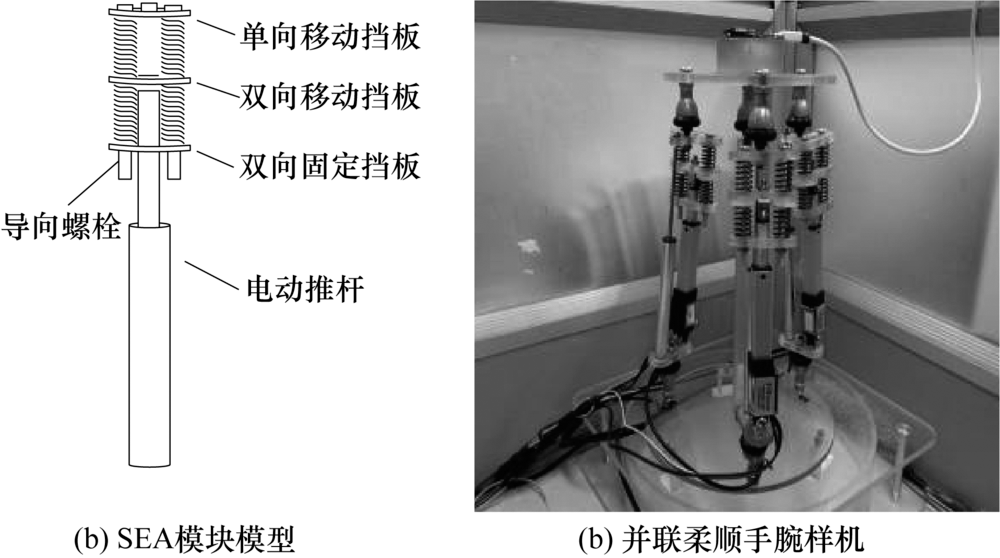 | 图2 SEA三维模型和并联柔顺手腕样机Fig.2 Three dimensional model of SEA and prototype of parallel Soft Wrist |
1)主动运动:电动推杆驱动双向移动挡板运动与单向移动挡板压缩上端弹簧产生变形, 动力通过单向移动挡板输出到末端, 实现柔顺输出.
2)被动运动:当SEA模块受拉力时, 单向移动挡板通过导向螺栓, 驱动双向固定挡板压缩下端弹簧组变形, 实现被动柔顺; 当SEA模块承受压力时, 由于电动推杆的自锁能力, 单向移动挡板与双向移动挡板压缩上端弹簧组变形, 实现被动柔顺, 对负载的冲击具有缓冲作用.
根据3SPS-1S并联机构数学模型, 由空间两点距离公式建立机构的运动学约束方程:
式中
式中,
li={
2xbi(d-Zai)sβ -2cβ [Xaixbicγ +
ybi(Zai-d)sα +Yaixbisγ ]-
2sα (-Yaizbicγ +Xaiybicγ sβ +
Xaizbisγ +Yaiybisβ sγ )-
2cα [zbi(Zai-d)cβ +Yaiybicγ -
Xaiybisγ +zbisβ (Xaicγ +Yaisγ )]}1/2 (3)
式中:
根据雅可比矩阵的定义, 通过推导动平台速度
将式(2)代入式(4), 化简得
式中
其中
公式(4)可以用矩阵表示为
式中:
定义
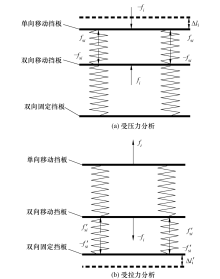
SEA模块的弹簧刚度直接决定整个并联柔顺手腕的整体刚度和柔顺性表现, 是整个柔顺手腕设计的核心环节.由于SEA模块中弹簧的变形远远大于其他构件因外力作用产生的机构形变, 在分析过程中, 设定:①弹簧之外的构件全部为刚性构件; ②机构的变形全部由弹簧变形产生.因此, 该机构的关节刚度与操作空间的刚度之间的映射关系可以转化为SEA模块的刚度与机构末端刚度之间的映射关系.
设定机构末端所受力矩和驱动支链受力分别为:
动平台的位姿变化和驱动支链的位移变化为:
在忽略摩擦力、重力等因素影响下, 根据虚功原理可知
驱动支链的整体刚度表示为
对SEA模块弹簧组受力分析如图 3所示, 分为受压力和受拉力两种情况.受压力时, 上方弹簧组产生压缩变形, 变形量为
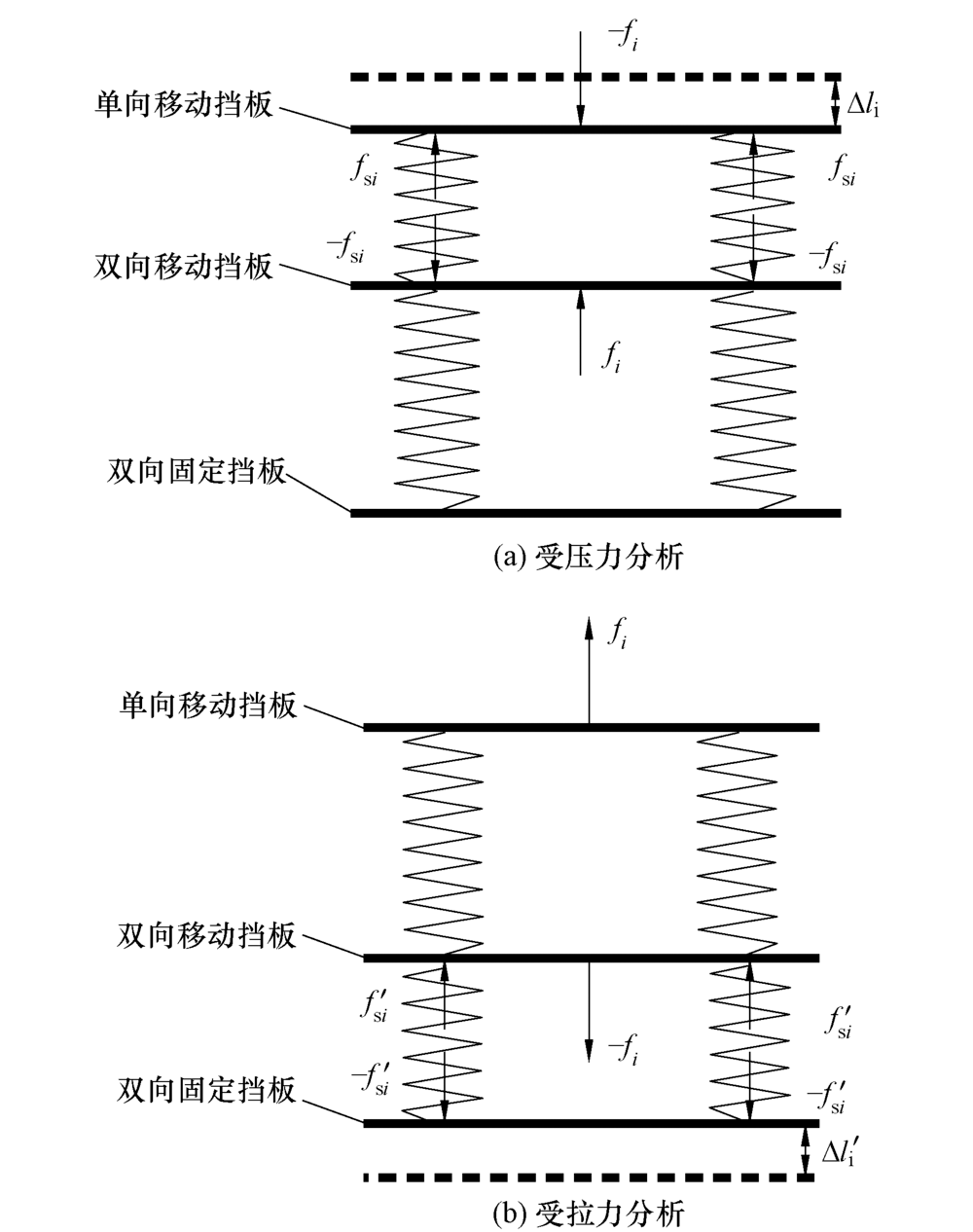 | 图3 弹簧受力分析Fig.3 Force analysis of springs |
通过受力分析可知
式中:
因此驱动支链的整体刚度和SEA模块的弹簧刚度关系为
因此各SEA模块的弹簧刚度可表示为
根据式(8)和式(10)可知弹簧的刚度取决于末端姿态变化和雅可比矩阵, 根据末端姿态变化求得支链的位移变化, 依据末端姿态求得雅可比矩阵, 利用式(13)即可求得SEA模块的弹簧刚度.
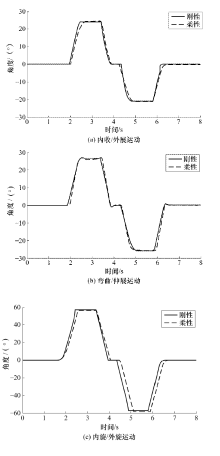
并联手腕的姿态控制是已知末端姿态的情况下, 根据运动学逆解公式求得驱动支链的位移, 并用于微型电动推杆的运动控制, 使末端动平台达到期望姿态.相比刚性手腕, 柔性手腕由于弹性环节的存在使得末端输出可能存在偏差, 本文将微型位移传感器与驱动支链并联, 通过柔性手腕的反馈环节, 根据微型位移传感器的测量值补偿电动推杆的输出以实现期望的动平台末端姿态.为了评价柔性手腕的位姿调整能力和控制策略的可行性, 通过实验对比了刚性手腕(弹簧换做刚性元件)和柔性手腕的姿态调整能力, 末端姿态通过姿态仪测量.手腕的运动如图4所示, 刚性条件下和柔性条件下3个自由度的运动曲线如图 5所示.
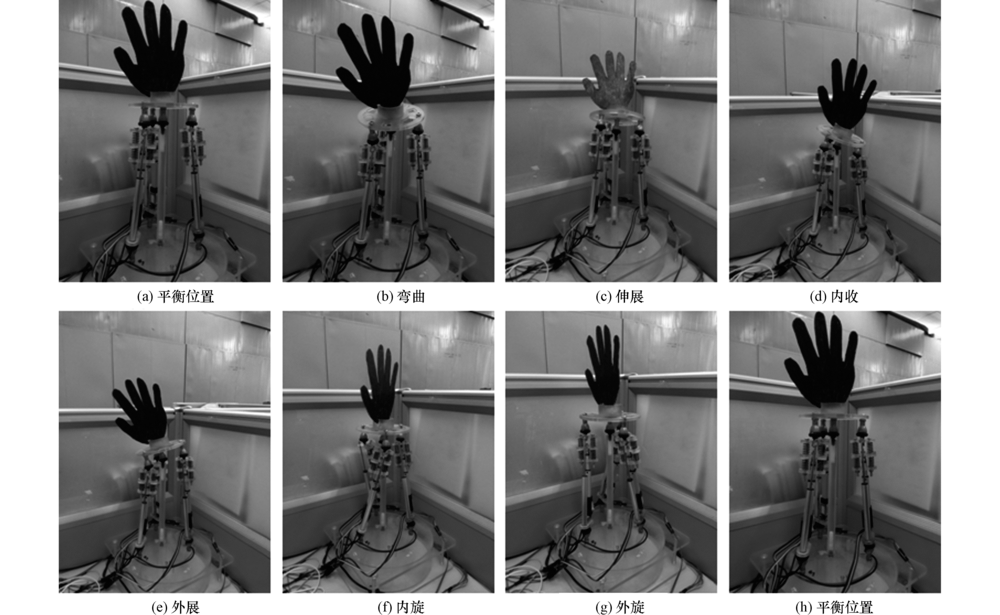 | 图4 柔顺手腕的运动Fig.4 Motion of Soft Wrist |
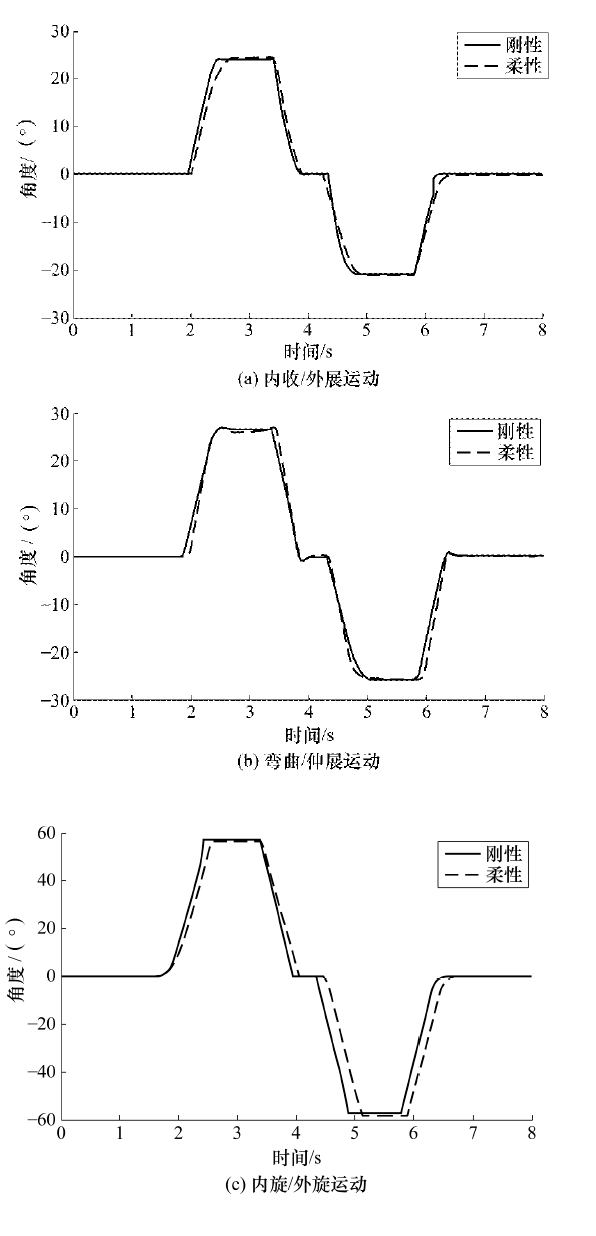 | 图5 刚性和柔性条件下3个自由度的运动曲线Fig.5 Motion curves of three degrees of freedom under stiffness and softness |
分析刚性手腕与柔性手腕的位姿曲线可知:
1)运动过程中柔性手腕相比刚性手腕具有一定的滞后现象, 这是由于柔性手腕中SEA弹性模块的存在使得电动推杆在驱动时首先要压缩弹簧产生变形, 通过弹簧力将动力输出到动平台.
2)柔性手腕能够实现近似刚性手腕的调姿能力, 这是由于增加了反馈补偿环节, 可以使柔性手腕通过补偿位移达到最终期望姿态.
为了验证并联柔顺手腕的柔顺性, 在并联柔顺机械手腕动平台边缘施加力, 如图6所示, 力的大小通过薄膜压力传感器测量, 直线位移传感器用于测量各支链的位移变化.通过施加力反馈控制, 设定施加力
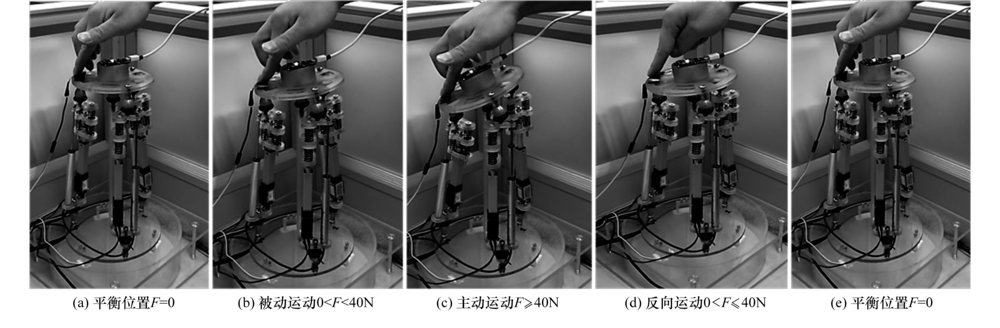 | 图6 柔顺性实验Fig.6 Compliance experiment |
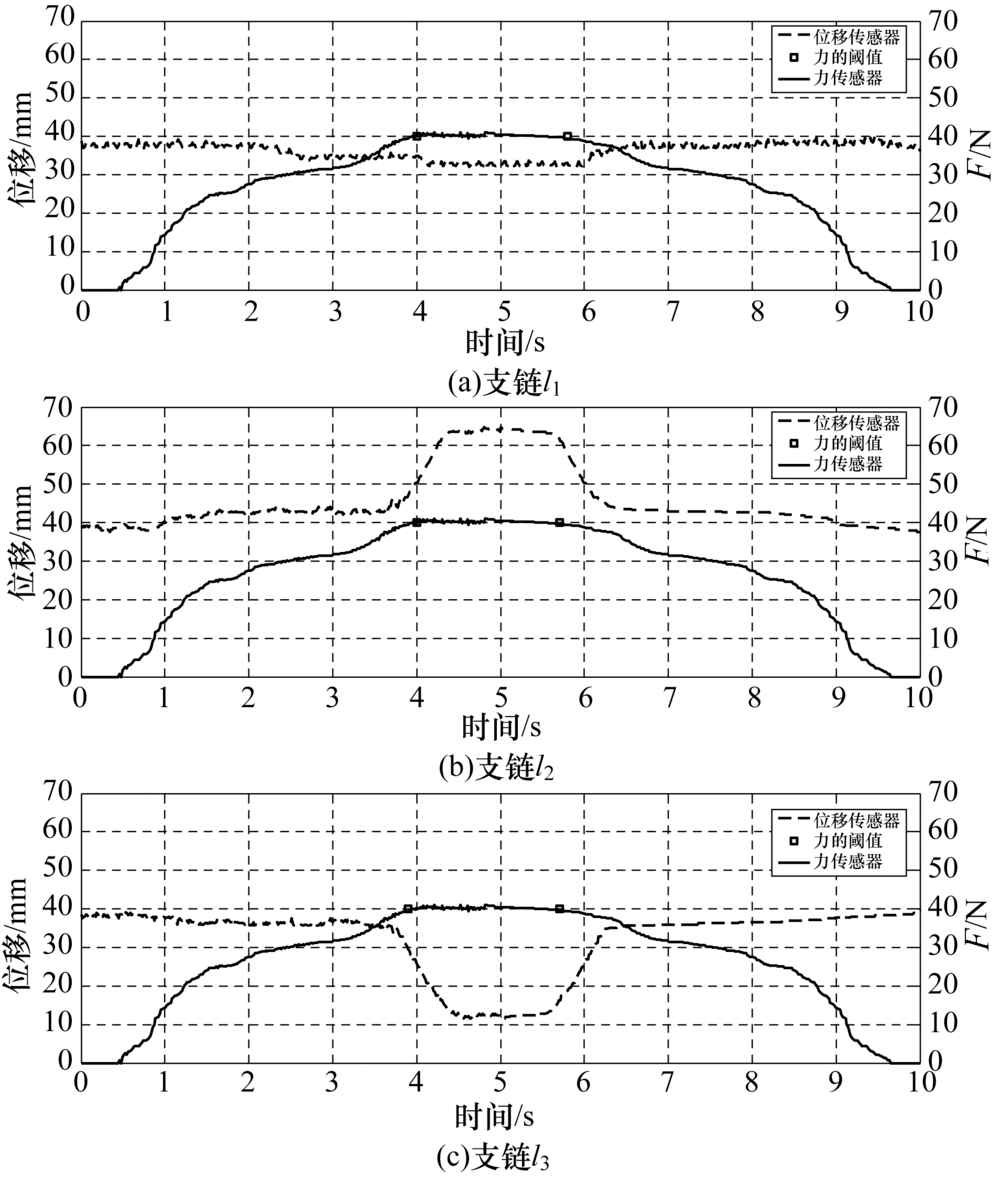 | 图7 各支链中位移传感器随力的变化曲线Fig.7 Curves for position sensor value following force |
实验过程中,
1)将3SPS-1S并联机构作为并联柔顺手腕的原型机构, 将电动推杆与弹簧组结合设计了一款双串联弹性驱动器.
2)建立约束方程求解得到机构的运动学逆解, 推导雅可比矩阵, 在SEA模块受力分析的基础上, 得到SEA弹簧刚度的确定方法.
3)制作并联柔顺手腕样机并完成了刚性和柔性手腕的位姿控制对比实验, 实验结果表明SoftWrist具有近似刚性手腕的调姿能力.通过实验验证了并联柔顺手腕对未知负载具有很好的被动柔顺性, 通过柔顺性控制策略可实现更高的主动柔顺.
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|