基于串联弹性驱动器的并联柔顺手腕的设计
 , 夏旭
, 夏旭 Design of a compliant parallel robotic wrist based on series elastic actuator
ZHANG Xiuli, XIA Xu
, XIA Xu 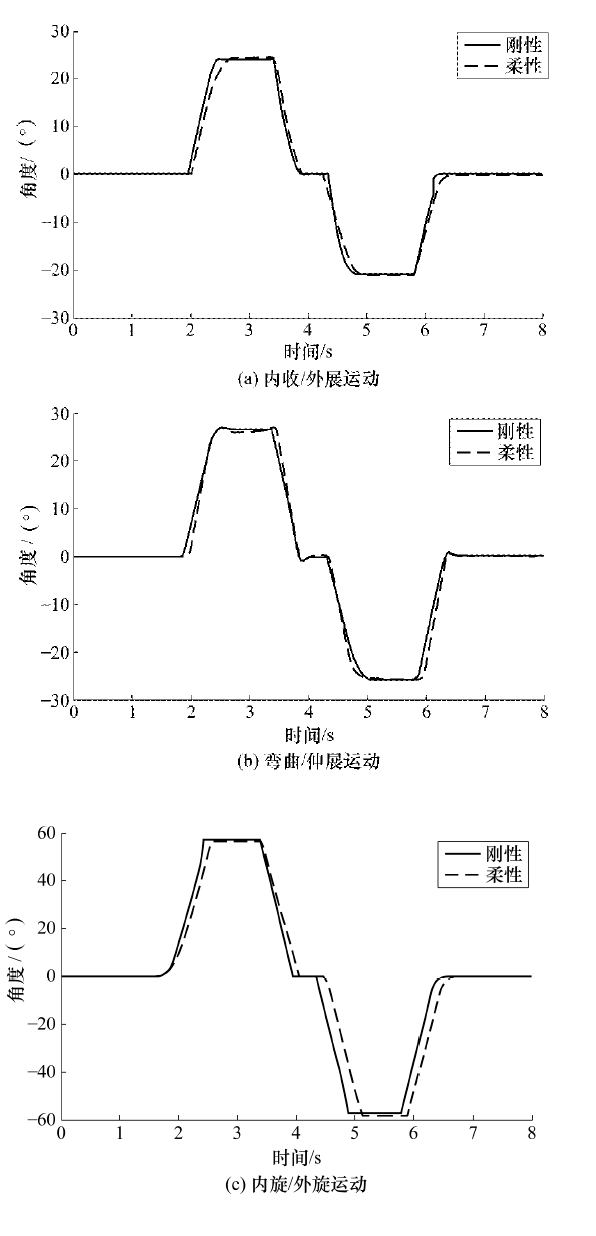
基于串联弹性驱动器的并联柔顺手腕的设计 |
|
张秀丽, 夏旭 |
Design of a compliant parallel robotic wrist based on series elastic actuator |
|
ZHANG Xiuli
, XIA Xu |
| 刚性和柔性条件下3个自由度的运动曲线 |
| |