



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于LSTM的列车测速测距设备故障诊断
[付文秀 , 李弘扬, 靳东明]
, 李弘扬, 靳东明]
, 李弘扬, 靳东明]
|
|


第一作者:付文秀(1962—),女,吉林长春人,副教授,博士.研究方向为交通信息工程及控制研究.email:wxfu@bjtu.edu.cn.
列车测速测距设备是列车运行控制系统的重要组成部分,也是故障率较高的设备之一.针对测速测距设备故障诊断自动化程度低的问题,提出一种基于LSTM(Long Short-Term Memory)神经网络的列车测速测距设备故障诊断方法,利用自适应最小支持度的加权Apriori算法从测速测距设备的时间序列中提取与故障分类关联度高的时间序列,构建故障数据集;利用LSTM神经网络对故障进行分类对比,测试结果表明:在以时间序列为故障特征的条件下,LSTM分类效果优于全卷积神经网络(Fully Convolutional Neural Networks,FCNN)与循环神经网络(Recurrent Neural Network,RNN).
Train speed and distance measuring equipment is an important part of train control system, and it is also one of the equipment with high failure rate. Aiming at the problem of low automation of fault diagnosis of speed measuring and ranging equipment, a fault diagnosis method of train speed measuring and ranging equipment based on LSTM neural network is proposed. The time series with high correlation with fault classification is extracted from the time series of speed measuring and ranging equipment by using the weighted Apriori algorithm of adaptive minimum support, and the fault data set is constructed. Then, LSTM neural network is used for fault diagnosis. Comparison results show that LSTM is better than FCNN full convolution neural network and RNN cyclic neural network under the condition of time series as fault feature.
列车运行控制系统是保障行车安全的核心, 其运行所需的主要信息, 如位置、速度信息等, 均由列车测速测距设备提供.列车测速测距设备一旦故障, 轻则列车晚点, 影响运营效率; 重则引发事故, 危及行车安全.目前, 城市轨道交通列车测速测距设备故障频发, 对此的故障诊断研究已经成为行业热点.
随着轨道交通领域的信息化发展与大数据时代的到来, 数据挖掘和人工智能等技术也逐渐应用于列车控制系统领域, 对列车运行控制系统建设、运营、维护的智能化发展产生了深远影响.
在故障诊断的数据源上主要分为系统故障文本信息和设备工作状态信息.系统故障文本主要分为人工记录的故障记录表或系统记录的故障代码.在此方面, 文献[1]提出了基于贝叶斯网络的列控车载设备故障诊断方法, 从武广高铁的故障文档中提取故障特征, 并利用粗糙集理论进行属性简约, 得到故障诊断决策表, 结合专家知识和贝叶斯神经网络构建故障诊断模型进行故障分类, 同时加入故障征兆关联改进诊断模型.文献[2]提出基于粗糙集理论的列控车载设备故障诊断方法, 利用CTCS3-300T中列车接口单元(Train Interface Unit, TIU)和应答器传输模块(Balise Transmission Module, BTM)单元的故障代码构建故障代码库, 为了降低数据噪声的影响, 引入粗糙集理论对数据进行降噪处理, 处理后的数据利用神经网络(Neural Network, NN)进行故障分类, 并比较了降噪前后的诊断效果.设备工作状态信息主要包含设备供电信息、输入信息和输出信息.文献[3] 提出智能蝙蝠算法(BA)与模糊逻辑理论(FS)、神经网络(NN)相融合的模型, 选取轨道电路继电器相位角、二元二位局部电压和轨道电压作为故障诊断的特征参量.文献[4] 提出一种基于隐马尔科夫模型(Hidden Markov Models, HMM)的道岔故障诊断方法, 将道岔动作功率信号按照时域特性和值域投影进行智能化分区, 以此构建特征候选集.
对于列车测速测距设备而言, 系统故障文本和设备工作状态信息都可作为其故障诊断的数据源; 但在实际运营维护中, 故障文本信息只能定位到设备级别, 对于设备的具体故障种类往往无法分辨; 而设备工作状态信息, 如电压、功率等信息, 在信号维护中是难以获取的.文献[5]利用HMM算法对列车定位单元的失效性空转和打滑进行故障诊断, 并与神经网络模型进行效果对比, 证明其有效性.此外, 故障诊断算法多为基础学习算法, 没有涉及深度学习算法, 在分类效果比较上往往具有片面性.
深度学习算法相较于基础机器学习算法有以下优点:1)无需先验知识和专家经验; 2)无需复杂的人工数据特征提取; 3)分类效果更优.文献[6]建立基于受限波尔兹曼机的深度信念网络对高速铁路车载设备进行故障诊断, 运用武广高铁的实际故障数据验证模型有效性, 并与最小临近算法及人工神经网络进行对比分析.文献[7]运用加权k最邻近算法对列车速度时间序列进行分析, 从中查找速度传感器虚接、断轴等故障.
时间序列作为复杂系统的重要参数特征, 常被引用于故障诊断中.文献[8]构建RNN模型对风力发电系统的发电机角速度传感器、俯仰角传感器等传感器进行故障诊断, 分类效果良好.文献[9]提出基于LSTM神经网络的故障诊断算法, 通过与SVM、RNN和CNN进行对比, 验证了其算法的优越性, 故障诊断准确率高达99.80%.
综上, 本文作者提出基于LSTM神经网络的列车测速测距设备故障诊断方法, 将列车测速测距设备的速度及列车不确定性时间序列作为故障诊断的数据源.从中提取故障特征, 并利用自适应最小支持度的加权Apriori算法对其中关联度低的序列进行简约, 从而构造时间序列特征集; 在此基础上, 利用LSTM神经网络对故障进行分类, 并与FCNN全卷积神经网络与RNN循环神经网络的分类结果进行比较; 通过列车实际运行及仿真数据验证故障诊断模型的有效性, 结果显示, 以时间序列作为故障诊断的数据源是行之有效的, 而LSTM神经网络所构建的故障诊断模型在诊断效率和泛化性能上都有较大优势.
在基于通信的列车运行控制系统中, 列车测速测距设备主要包括轮轴式速度传感器、测速雷达和应答器.轮轴式速度传感器主要分为车轮脉冲发生器(Wheel Impulse Generators, WIG)、光脉冲发生器(Optical Pulse Generator, OPG)和霍尔效应传感器(Hall-Effect Sensor, HES)3种, 本文中所述轮轴式速度传感器为光脉冲式, 以下简称OPG[10].测速雷达测速原理是通过多普勒效应测量列车的对地相对位移.地面应答器和应答器传输模块BTM共同完成列车位置校正等辅助定位功能.列车测速测距设备架构如图1所示.
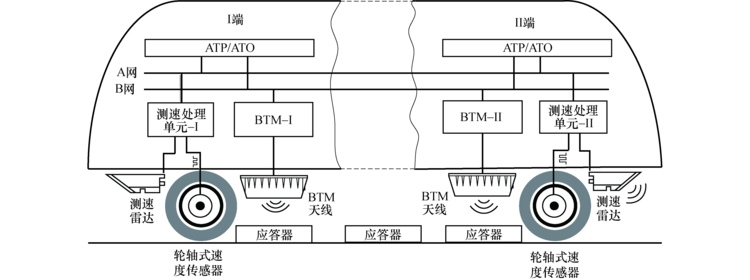 | 图1 列车车载测速测距设备架构图Fig.1 Structure diagram of train on-board speed and distance measuring equipment |
1)轮轴式速度传感器故障.
轮轴式速度传感器安装于列车非动力轮上, 利用光栅盘产生脉冲, 测速处理单元结合轮径值与脉冲数计算得出列车速度和位移.传感器脉冲输出通道一般为4个, 用于测速处理单元进行比较.常见的轮轴式速度传感器故障有轮径值未校准、传感器硬件故障、传感器通道虚接和列车空转/打滑.
2)测速雷达故障.
测速雷达测算列车的相对位移, 因此故障类型比较单一, 主要分为雷达安装角度偏差和雷达硬件故障.
3)应答器故障.
应答器故障主要表现为应答器丢失, 列车不确定性增大; 随着不确性的增大, ATP无法获取列车停站状态或列车位置丢失, 最终导致列车紧急制动.
时间序列是按照一定采样率, 在相同的时间间隔内, 对某种过程或现象观测记录的结果[11].故障时间序列, 能够记录故障的动态演变过程, 多用于数据驱动的故障诊断方法.在列车运行控制系统中, 车载日志记录单元以500 ms为通信周期从其他子系统中收集各设备的工作状态并进行记录, 即列车行车日志中所记录的信息是包含各设备工作信息的时间序列.行车日志所记录的时间序列信息主要包括测速测距设备速度、里程、列车不确定性、列车运行状态、设备工作状态、设备工作异常代码等信息.测速测距设备故障时刻异常时间序列如图2所示.
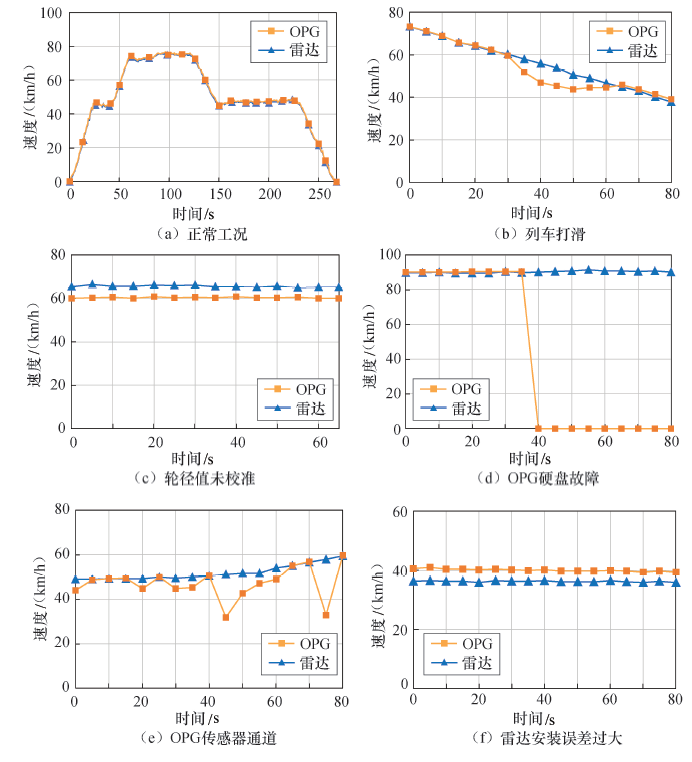 | 图2 故障时刻异常时间序列示意图Fig.2 Diagram of abnormal time series at fault time |
诊断方法的实现主要分为3个步骤, 首先从行车日志中提取测速测距设备相关的时间序列, 基于自适应最小支持度的加权Apriori算法对时间序列进行简约, 得到与故障种类关联度高的时间序列, 然后利用简约后的时间序列集构建LSTM神经网络故障诊断模型, 并对其分类效果进行比较和分析, 如图3所示.
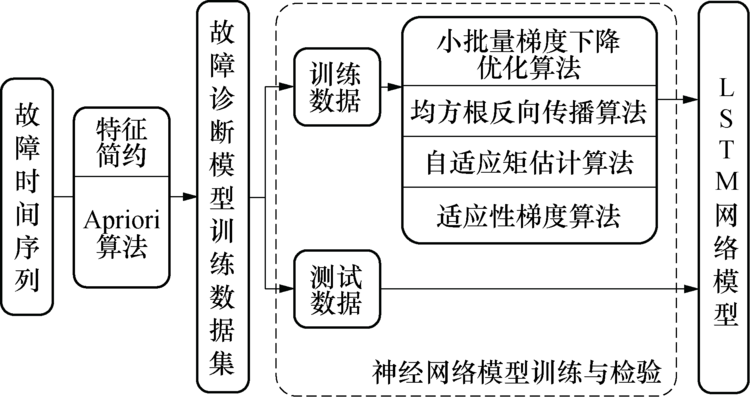 | 图3 基于LSTM的故障诊断方法流程Fig.3 Flow chart of fault diagnosis method based on LSTM |
行车日志中包含很多时间序列, 当设备故障发生时部分时间序列会发生改变, 这些改变可作为故障诊断的数据特征.但有些时间序列与故障相关性不高, 因此需要对时间序列进行分析, 从中找出相关性强的时间序列.
2.1.1 关联规则算法概述
关联规则算法用于查找数据之间的关联性, 并将关联度高的数据组合构成频繁项集.频繁项集的评价指标为支持度(Support), 关联规则的评价指标为置信度(Confidence)[12].
设I为项的集合, 数据D是数据库, 其中每个事物T是项的集合, 使得
若
一般在分析时还会将提升度(Lift)作为关联度的评价标准, 当提升度大于1时, 表示事务正相关性较好.提升度表示为
2.1.2 自适应最小支持度的加权Apriori算法
Apriori算法是一种寻找最大频繁项集的算法, 首先生成单个项的所有项集
由于现场故障日志具有故障分布不均衡的特点, 若最小支持度设置较高, 会导致部分故障特征信息丢失; 若最小支持度设置较低, 则会导致无法筛选掉与故障关联性小的数据项从而增大了计算量.针对这种情况可以采取最小支持度自适应的方法.算法伪代码如下
自适应最小支持度的加权Apriori算法
输入:
输出:
算法:
1:从D中找到数据项生成候选1项集
2:通过遍历生成包含故障数据项的候选2项集C2.
3:根据不同故障的支持度Smin_Fk和Smin计算不同故障对应的最小支持度:Smin_Sk=Smin_Fk× Smin
4:扫描C2进行最小支持度筛选得到S2.
5:For(k=3; Sk-1!=null; k++)
{
6:根据频繁k-1项集Sk-1产生候选项集Ck.
7:For each t in Ck
{
8: 扫描Ck进行最小支持度筛选得到Sk.
}
}
9.Return S_D中所有的频繁集
对列车行车数据进行分析, 从中筛选异常时间序列数据项进行编码.编码规则如表1所示.
| 表1 异常时间序列数据项编码规则 Tab.1 Coding rules for abnormal time series data items |
将{OPG传感器故障, 雷达故障, 应答器丢失}3种故障进行编码得到
| 表2 3种故障对应的最大频繁项集 Tab.2 Maximum frequent item set corresponding to three kinds of faults |
由于OPG和雷达同属测速传感器, 其速度与里程信息属于同种信息的不同体现, 且在应答器丢失时列车保护速度与列车推荐速度同时突变为0, 可供分析的数据较少.因此, 选取列车不确定性、OPG速度与雷达速度, 即
2.2.1 LSTM神经网络概述
深度学习网络RNN拥有循环链接, 使其在时间序列的数据分析上有较强的适应性[13].RNN神经网络包括输入层、隐藏层和输出层.输入时间序列
式中:
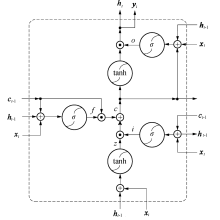
对此, LSTM将RNN中的隐藏层细胞替换为LSTM细胞, 解决了长期记忆不足的问题.LSTM模型的细胞结构如图4所示.
 | 图4 LSTM隐藏层细胞结构Fig.4 Cell structure of LSTM hidden layer |
2.2.2 数据预处理
选取行车日志中双端OPG不同通道速度、雷达速度、列车不确定性作为原始数据.为了消除列车正常行驶的速度变化影响, 将相同传感器的不同通道速度信息进行做差, 最终以OPG传感器4个通道的速度与雷达速度之间的差, 冗余雷达速度之间的差以及列车的位置不确定性作为模型的输入时间序列, 时间序列长度为40, 每组训练数据为7维.
通过对广州地铁现场故障行车日志的整理, 共整理出实际故障数据67条.为了增加训练数据量, 提高分类准确度, 利用测速测距系统仿真实验环境对故障数据进行仿真.同时利用基于统计假设检验对仿真数据进行验证, 验证方法采用K-S检验和T检验, 验证结果拒绝了仿真日志和现场日志之间存在明显差异性的假设, 验证了仿真日志的可用性和准确性.利用真实故障数据与仿真数据构造数据集, 故障时间序列总长度为18 000.
为了消除不同时间序列量纲所带来的影响, 需要对其进行归一化处理.原始数据为
同时, 利用One-Hot编码对故障类别标签进行编码, 故障共分7类.列车打滑
| 表4 故障类别的One-Hot编码 Tab.4 One-Hot coding of fault category |
将归一化后的时间序列数据分为3部分, 50%数据用于模型构建, 25%的数据作为验证数据用于验证模型, 剩下的用于测试模型的诊断效果.
2.2.3 LSTM模型训练
输入时间序列维数为7, 则模型的输入层节点为7.输入层与隐含层将输入数据映射到隐含层的特征空间, 全连接层作为输出层, 同时起到分类的作用, 将输出的二维特征转化为一维特征映射到样本标签空间, 进行故障分类.
全连接层激活函数选用多故障分类Softmax函数.Softmax将一个含任意实数的
网络损失选用交叉熵损失函数, 对训练模型进行优化.损失函数定义为
式中:
网络的训练过程采用小批量梯度下降法(Mini-batch Gradient Descent), 利用训练数据对网络进行训练.训练时, 每一次给神经网络输入Batch_Size大小的数据, 更新模型的参数, 为一次迭代过程.经过若干次迭代, 训练完整个数据集即完成一次epoch后, 使用验证数据评判神经网络分类结果的误差、准确率和F1值, 验证网络的分类能力和泛化能力.对于模型的训练结果, 本文采用准确率(accuracy)和F1值进行评估.
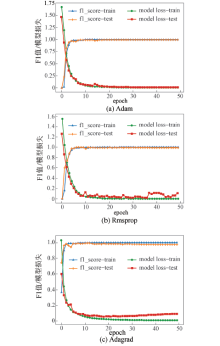
通过测试集验证及F1值对模型分类结果的评判, 梯度下降算法采用均方根反向传播Rmsprop、自适应矩估计Adam和适应性梯度算法Adagrad.3种梯度下降算法的F1值及模型损失见图5.
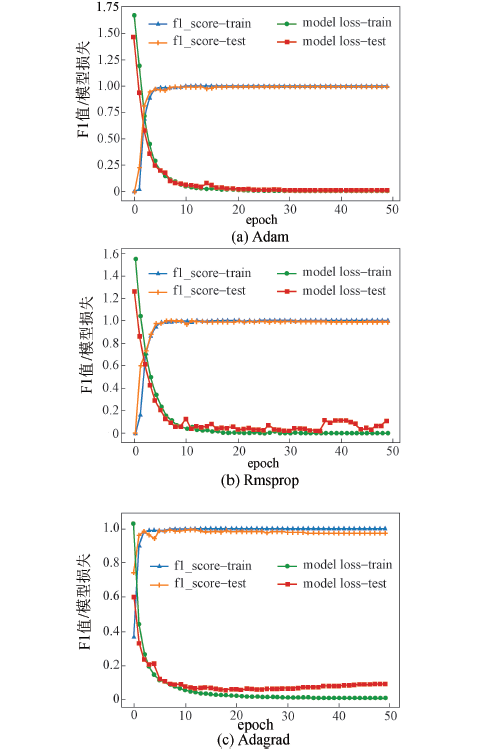 | 图5 3种梯度下降算法下的F1值及模型损失Fig.5 F1 score and model loss under three gradient descent algorithms |
Rmsprop算法在训练的中后期模型损失值震荡较大, 出现了过拟合现象; Adagrad算法中模型损失无法收敛, 存在过拟合的情况.而Adam算法在F1值及模型损失方面均优于其他两种算法.
因此选用Adam梯度下降算法, 针对不用的批尺寸大小做对比训练, 结果如图6所示.
 | 图6 Adam算法下的训练模型损失Fig.6 Loss of training model under Adam algorithm |
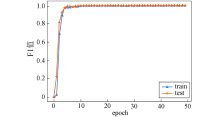
Batch_size取1和4时, 验证数据的模型损失值存在波动和过拟合的情况; Batch_size取64时, 模型训练速度较慢, 模型损失无法快速收敛.当Batch_size取16时, 模型的拟合性最好, 模型损失震荡最小, 分类效果最好.此时所建立的模型训练的参数量为3622, F1值为97.6%, 准确率为98%, 损失值为0.08, 训练的F1值如图7所示.
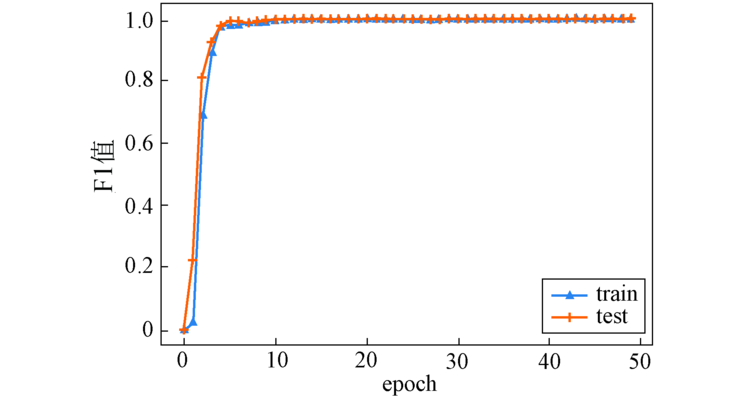 | 图7 F1值评判故障诊断模型Fig.7 F1 score evaluation fault diagnosis model |
为了对比LSTM模型的效果, 利用相同故障数据, 选用全连接神经网络(FCNN)进行对比.FCNN神经网络模型输入层的输入节点数目为280, 输出节点数目为512.隐含层的输出节点数目为256.神经网络模型参数数量为235 782, 分类准确率为95.3%, F1值为95.3%, 损失值为0.12.
为了对比深度学习算法与普通算法的效果, 建立贝叶斯神经网络(Bayes)与支持向量机(SVM)分类模型.效果最好的Bayes网络分类准确率为67.1%, F1值为65.2%; 效果最好的SVM模型, 分类准确率为57.3%, F1值为56.7%.同样为了对比的效果, 将建立的LSTM神经网络故障诊断模型中的LSTM单元换成RNN单元, 其他参数包括隐含层层数, 隐含层节点数都保持不变.训练结果显示RNN在100个epoch内仍无法完成训练, 且最终损失值都在0.4以上.效果最好的RNN模型分类准确率为78.3%, F1值为75.2%.
| 表5 故障诊断模型效果对比 Tab.5 Effect comparisons of fault diagnosis model % |
1)针对列车测速测距系统的故障诊断问题, 提出基于LSTM的列车测速测距系统故障诊断方法.将列车不确定性、OPG速度、雷达速度作为故障诊断特征属性, 构建以Adam算法为梯度下降算法的LSTM神经网络, 对列车打滑、轮径值未校准、OPG传感器通道虚接、OPG传感器硬件故障、雷达硬件故障、雷达安装角度偏差过大、应答器故障7种故障进行诊断.
2)通过模型验证并与普通网络模型、FCNN、RNN模型对比验证了该方法的可行性及优越性.对实现列车测速测距设备的故障诊断具有一定参考价值.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|