

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
考虑死区时间的直线感应电机参数静止自整定方法
[吕刚 , 杨琛, 罗志昆]
, 杨琛, 罗志昆]
, 杨琛, 罗志昆]
|
|


第一作者:吕刚(1976—),男,河南焦作人,教授,博士,博士生导师.研究方向为轨道交通大功率直线电机及其驱动系统、新型高速磁悬浮及电磁推进技术.email:ganglv@bjtu.edu.cn.
针对直线感应电机初级和次级漏感不相等的特点,对直线感应电机静止状态下的参数辨识方法进行研究.首先,分别针对死区时间为0、1、2、3和4 μs的情况进行场路联合有限元法仿真.利用PWM逆变器依次向直线感应电机中通入单相直流电压、单相交流高频电压和单相交流低频电压来获得等效电路中的各个参数.然后,将不同死区时间下的辨识结果与实际值进行比较,并进行误差对比,讨论不同的死区时间对辨识精度的影响.最后,分别分析死区效应对初级电阻及漏感、互感、次级电阻及漏感的辨识结果产生的影响.结果表明:在考虑到直线感应电机的初、次级漏感不相等的情况下提出的基于PWM逆变器的静止状态下参数辨识方法,辨识结果比较精确,验证了方法的正确性,死区效应的存在对直线电机各个参数的辨识结果均产生影响.
In view of the fact that the primary and secondary leakage inductances of the linear induction motor are not equal, the parameter identification methods of the linear induction motor in static state is studied. Firstly, the field-circuit coupling finite element method simulation is performed under the dead time of 0, 1, 2, 3 and 4 μs. The PWM inverter is used to input single-phase DC voltage, single-phase high-frequency AC voltage, and single-phase low-frequency AC voltage into the linear induction motor sequentially to obtain parameters of the equivalent circuit. Then, the identification results under different dead time are compared with the actual values, and error comparison is conducted. Therefore the impact of different dead time on the accuracy of identification is discussed.Finally, the effect of the dead zone effect on the identification results of primary resistance, leakage inductance, mutual inductance, secondary resistance and leakage inductance are analyzed separately. The results show that the consequence of the parameter identification method based on PWM inverter are more accurate when considering the fact that primary and secondary leakage inductance of linear induction motor are not equal,and the correctness of method is verified. The dead zone effect can impact the parameter identification results of linear motor.
电机参数的精确与否是影响电机控制精度的关键因素.与传统的旋转感应电机不同, 通常情况下直线感应电机(Linear Induction Motor, LIM)的机械气隙相对较大, 因此其励磁电感比同容量的旋转感应电机小很多[1].并且直线感应电机的初级绕组嵌套在槽内, 次级部分则是由整块的铝板和次级铁轭压制而成, 没有与旋转感应电机的鼠笼式转子导条和短路环相似的结构, 所以直线感应电机的初级漏感比次级漏感要大得多[2].因而, 采取传统旋转感应电机的参数辨识方法对直线感应电机的参数进行辨识, 辨识误差较大, 无法满足辨识精度的要求.
文献[3]提出的参数辨识方法是基于变频器本身来实现的, 不需要额外添加设备对电机进行机械堵转, 但是该方法只适用于定子漏感和转子漏感相同的传统感应电机, 对于初、次级漏感不相等的直线感应电机来说, 会导致辨识精度无法满足要求.文献[4]提出了一种根据感应电机铭牌上的数据和稳态模型获得电机稳定状态及启动时的参数.但是主要针对大型火力发电厂的泵电动机, 以及实际的紧急启动案例研究有效, 且要求现场操作人员具有较高的专业技能.文献[5, 6]通过空载实验和堵转实验获取电机的参数, 但是空载实验需要去除次级铝板.而短初级直线感应电机的初级悬挂在车上, 次级铺设在地面上作为轨道, 在通电后还会形生法向力作用于电机, 产生运行阻力, 导致空载实验在实际情况中实施困难[7].文献[8]利用静态频率响应测试从感应电机的二阶传递函数导出等效电路模型, 但是这种方法需要用到频率响应分析仪和功率放大器.文献[9]采用PWM逆变器进行参数辨识, 采用向电机中通入直流的实验方法得到电机的初级参数, 通过从整个电路的等效电感中求解三阶多项式得出互感, 从而可以分别求出初级和次级漏感.这种方法利用PWM逆变器输出的d、q两轴为0代替堵转实验, 虽然考虑到了次级漏感与初级漏感不相等的问题, 但是没有讨论死区效应对参数辨识的影响.
本文作者针对目前直线感应电机通常采用变频器进行驱动控制的现状, 结合三相电压型逆变电路供电的特点, 在考虑到直线电机初、次级漏感不相等特性的情况下, 提出了一种基于PWM逆变器对直线感应电机等效电路进行参数辨识的方法, 不需要添加额外的设备对电机进行机械堵转, 而是添加一段参数辨识的程序, 就可以直接将辨识结果传给电机的控制程序.另外, 由于直线感应电机存在边端效应, 以及轨道长度的有限性和运动位置不重复性, 旋转感应电机的空载离线参数测量和在线辨识方法对于直线感应电机通常是不太可行的[10].因此, 通过向电机施加单相激励, 即可以使电机在保持静止的状态下获取电机的参数.为了使辨识过程更接近于工程实际, 采用Simplore与Maxwell软件在不同死区时间的条件下进行场路联合有限元仿真, 讨论死区效应对参数辨识精度的影响.
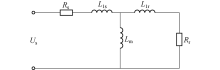
直线感应电机处于静止状态下的T型等效电路如图1所示.其中
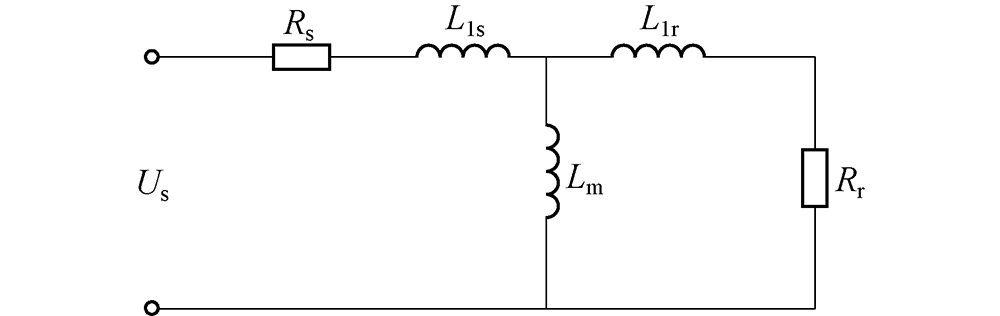 | 图1 直线感应电机的T型等效电路Fig.1 T-equivalent circuit of linear induction motor |
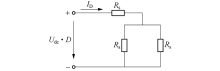
当给直线电机通入直流电压时, 电感相当于短路, 电压完全施加在初级电阻两侧, 因此此时的等效电路中只需要考虑初级电阻, 如图2所示, 图中Udc 为通入的直流电压, D为降压斩波的占空比, ID 为通入直流电压后相电流的平均值.由于初级电阻一般阻值较小, 为了防止施加到电机上的电压过大, 需要进行降压斩波.同时, 逆变器开关管的饱和压降和死区时间会对初级电阻辨识结果产生较大的影响, 为了减少辨识误差, 给直线电机通入两次不同的直流电压, 用得到的电压、电流的斜率作为
式中:
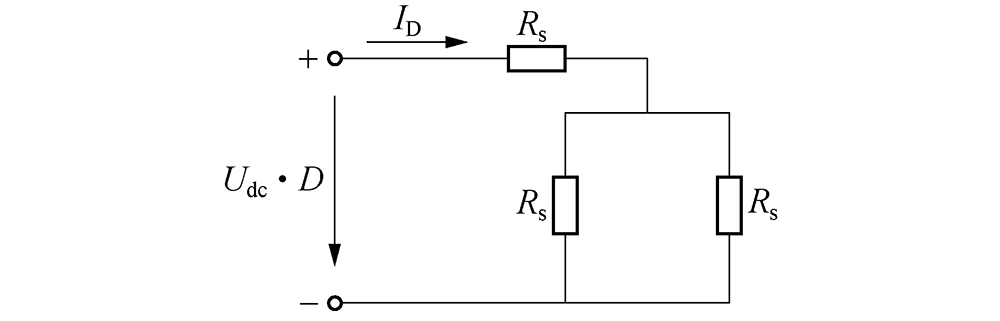 | 图2 通入直流电压的T型等效电路Fig.2 T-equivalent circuit when inputting DC voltage |
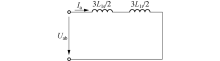
当向直线电机通入单相交流高频电压时, 励磁支路感抗远远大于初、次级漏抗, 从而使得励磁支路流过的电流很少, 可以忽略, 同时, 初、次级电阻也远小于初、次级漏抗, 初、次级电阻上的电压降很小, 也可以忽略.因此, 通入单相交流高频电压时直线感应电机的等效电路由初级漏感和次级漏感串联而成, 如图3所示,
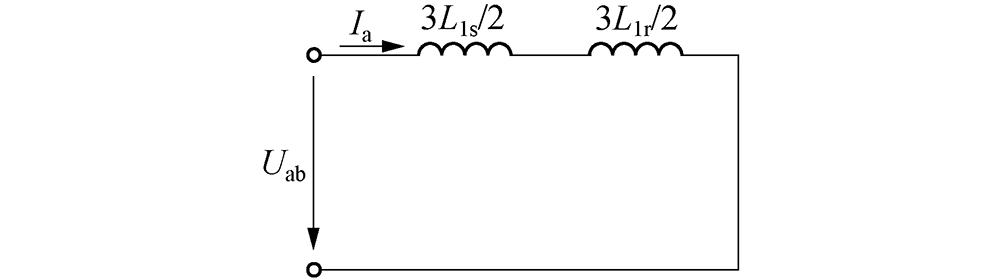 | 图3 通入交流高频电压的T型等效电路Fig.3 T-equivalent circuit when inputting high-frequency AC voltage |
通过测量Uab 和Ia, 可以得到初级漏感与次级漏感之和c.因此, c的估算值为
式中:
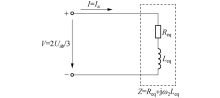
当向直线感应电机施加交流低频电压时, 对等效电路进行简化, 简化后的等效电路如图4所示.
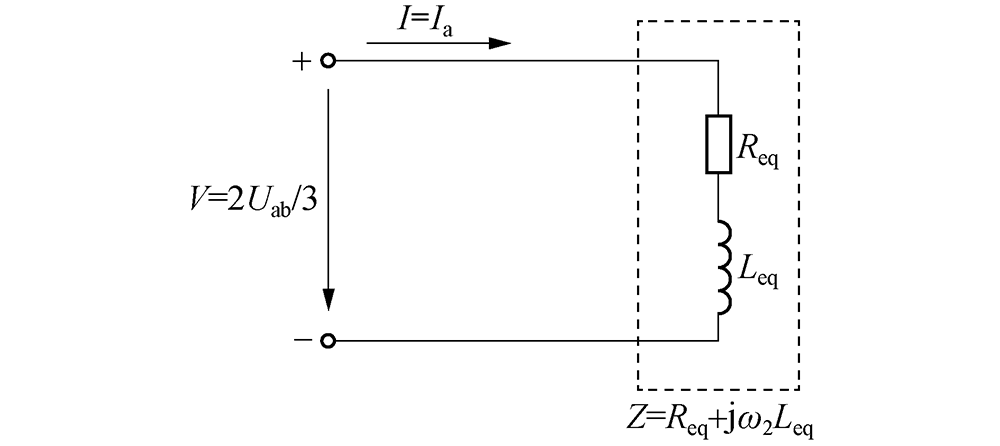 | 图4 通入交流低频电压的T型等效电路Fig.4 T-equivalent circuit when inputting low-frequency AC voltage |
图4中, Z是等效阻抗; V是加在等效阻抗上的电压; I是流过等效阻抗的电流; 等效电阻Req 、电感Leq分别表示为
式中:
次级漏感为
初级漏感为
次级电阻为
其中根据经验可得[11],
理想情况下, 逆变电路上、下桥臂的开关管不会同时导通或关断, 即开通和关断在控制信号发出后动作没有延时.但是在实际情况中, 功率开关管的导通和关断不可能瞬时完成.而由于开关器件的导通时间一般比关断时间长, 导致上、下桥臂开关管同时导通, 造成逆变失败或器件被烧毁[12].因此要将开关管的触发时间延迟一段时间, 这段延时即为死区时间
由文献[13]可知, 由死区造成的误差电压的一般表达式为
式中:
根据式(10)、(11)可知, 死区时间将造成与电流方向相反的误差电压.把逆变器给定电压
在考虑死区电压影响后, 桥臂实际输出电压为
由式(13)可知输出电压矢量的虚部不受死区的干扰, 由每个桥臂上死区造成的误差电压幅值不变且只与电流方向有关.
为了准确地辨识直线感应电机的参数, 考虑到直线感应电机初、次级漏感不相等和边端效应的影响, 以及死区效应对参数辨识精度的影响, 采用场路联合有限元仿真, 在Ansys Maxwell中搭建单边直线感应电机的3D模型, 在Simplore中搭建PWM逆变电路, 来控制施加给直线感应电机的激励[14].其中, 直线感应电机的主要参数如表1所示.由于在PWM控制中死区时间通常设置为1~4 μ s[15], 因此将死区时间
| 表1 直线感应电机主要参数 Tab.1 Main parameters of linear induction motor |
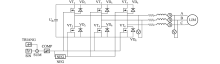
直流实验的场路耦合有限元模型如图5所示.在图5中, VT1~VT6为三相桥式逆变电路的6个IGBT开关管, VD1~VD6为并联的反馈二极管, VT4和VT6始终保持导通, VT2、VT3和VT5始终保持关断, VT1则通过周期
 | 图5 直流实验的场路耦合有限元模型Fig.5 Field-circuit coupling finite element method model of AC circuit experiment |
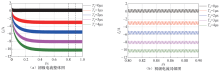
由于占空比的增大, 会使得初级电流增大, 为了保证在实验过程中所选择的占空比可以使得电流不至于过大, 对占空比为5%~50%情况下的初级电流值
| 表2 不同占空比下的初级电流平均值 Tab.2 Mean value of primary current with different duty ratio |
根据表1给出的电机参数计算电机额定电流为7.22 A.因此, 为了保证流过电机的电流不超过电机的额定电流, 所选占空比不大于20%.
交流实验场路耦合有限元模型如图6所示.其中, VT4和VT6保持同步导通或关断, VT3和VT5保持同步或关断, 此时B、C相相当于并联, 直线电机中施加的电压等效为单相电压.
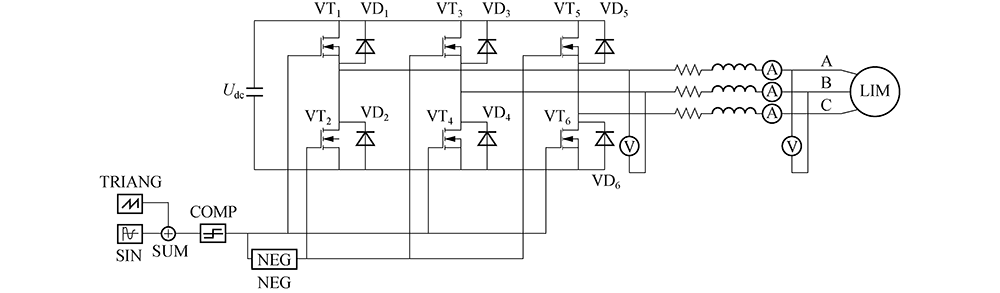 | 图6 交流实验的场路耦合有限元模型Fig.6 Field-circuit coupling finite element method model of AC circuit experiment |
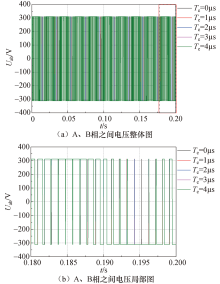
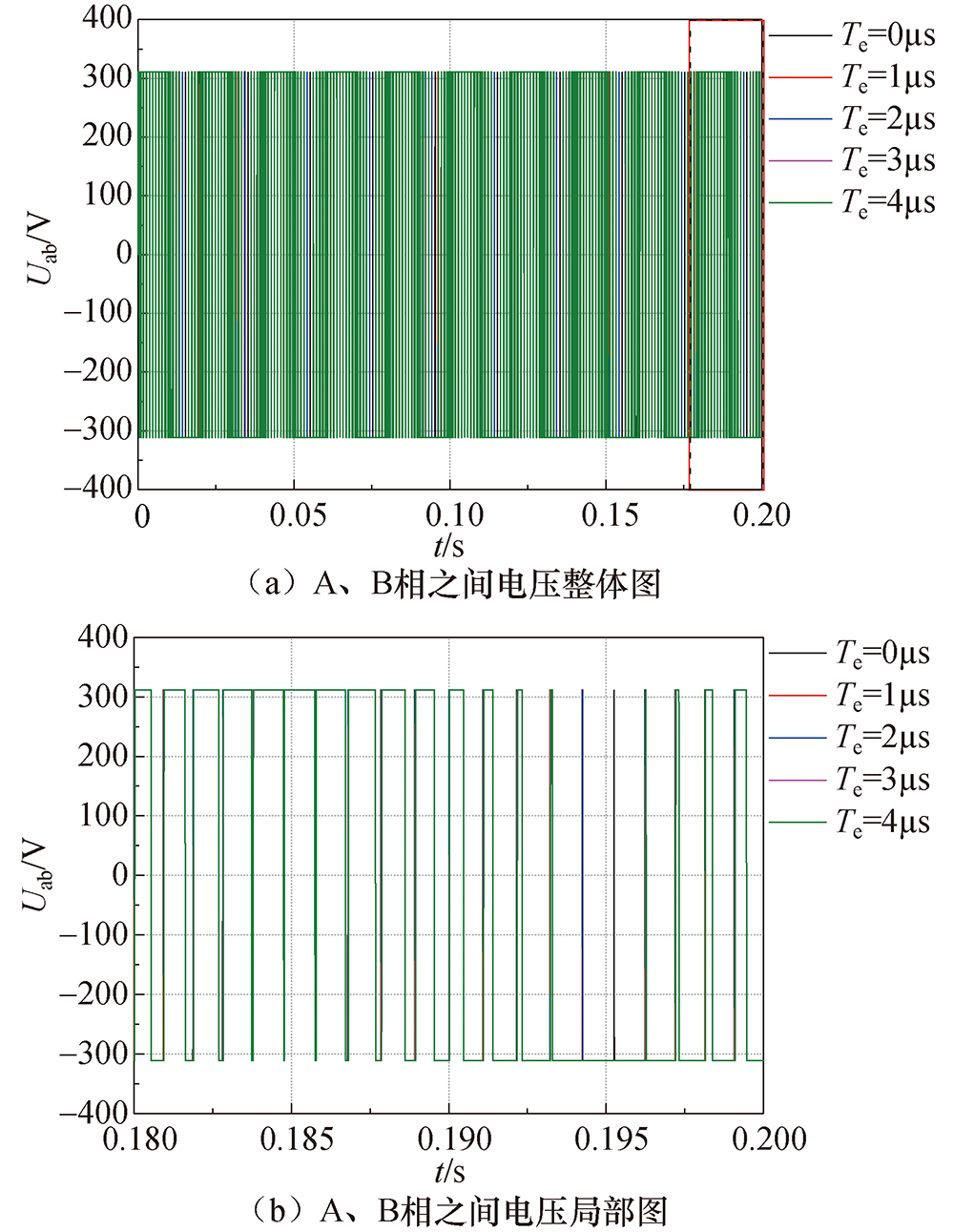
当进行高频实验时, 所通入电压频率
 | 图7 高频交流仿真实验中的初级电压Fig.7 Primary voltage in high-frequency AC simulation |
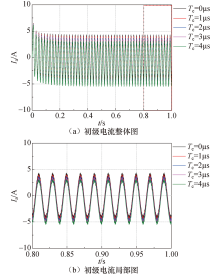
 | 图8 高频交流仿真实验中的初级电流Fig.8 Primary current in high-frequency AC simulation |
从图7可知, 由于死区时间的存在, 产生的PMW脉冲宽度发生了变化.在一个周期内, 正弦波正半波对应的脉宽减小, 负半波对应的脉宽增大, PWM波形发生畸变, 稍稍偏离正弦波.从图8可知, 死区效应导致初级电流减小, 且稳定速度减慢.
对所得的电压、电流进行傅里叶分析, 结果如表3所示.可以看出, 死区时间的存在导致电压
| 表3 高频交流仿真实验中傅里叶分析结果 Tab.3 Fourier analysis results in high-frequency AC simulation |
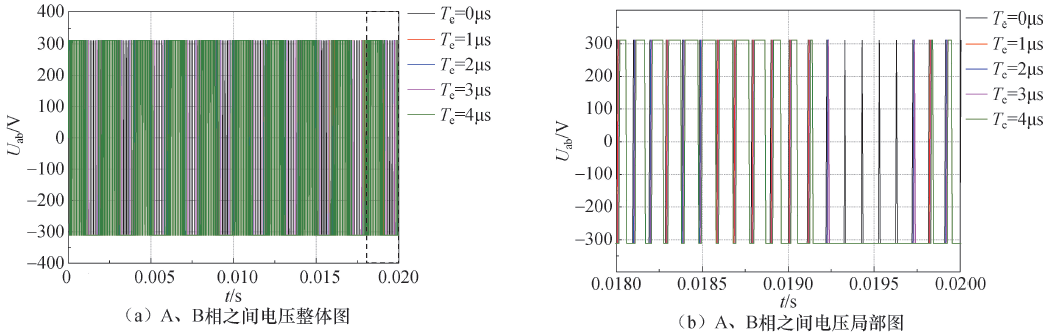
进行低频实验时, 所选频率
| 表4 低频交流仿真实验中傅里叶分析结果 Tab.4 Fourier analysis results in low-frequency AC simulation |
 | 图9 低频交流仿真实验中的初级电压Fig.9 Primary voltage in low-frequency AC simulation |
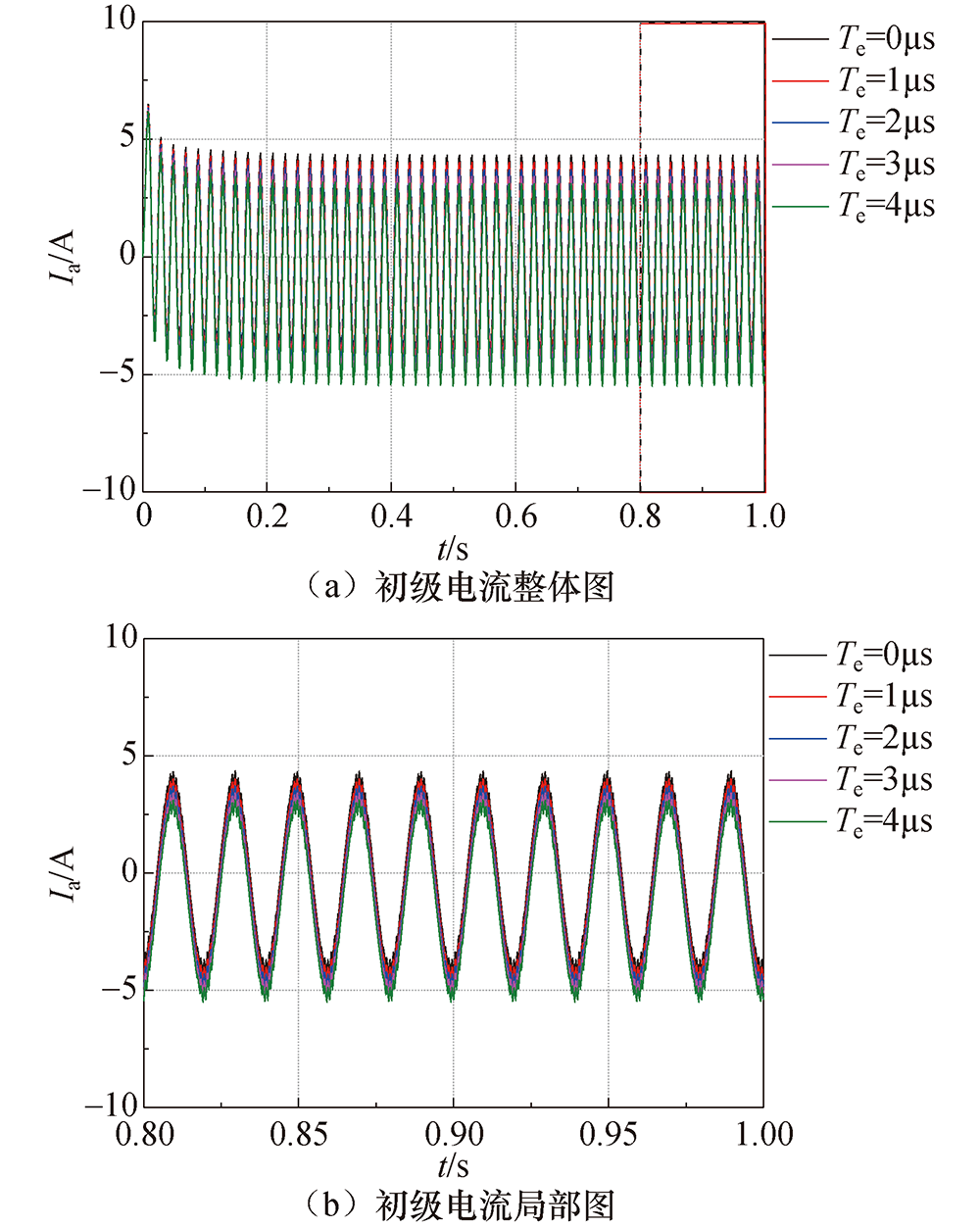 | 图10 低频交流仿真实验中的初级电流Fig.10 Primary current in low-frequency AC simulation |
由表4可知, 由于f1 远大于f2, 可得Ts1 远小于Ts2, 因此低频实验中电压、电流的仿真结果趋势同高频实验一致, 但是死区时间对低频实验的影响远小于高频实验.
直流实验中, 将表2中的电流有效值代入式(1)进行计算, 得到不同死区条件下初级电阻Rs 的估算值; 高频交流实验中, 将表3中电压、电流的幅值代入式(2), 得到各个死区时间下初级漏感和次级漏感之和c的估算值; 在低频交流实验中, 将表4中电压、电流的幅值代入式(4)、式(5)得到等效电阻Req 和等效电感Leq, 再根据式(6)~ 式(9)计算得到互感Lm 、次级漏感L1r 、初级漏感L1s 和次级电阻Rr的估算值.因此, 电机实际参数与辨识结果如表5所示.
| 表5 辨识结果对比 Tab.5 Comparison of identification results |
从表5中可知, 当
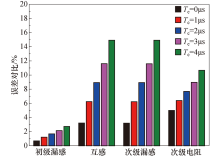
各个参数辨识结果的误差对比如图11所示.
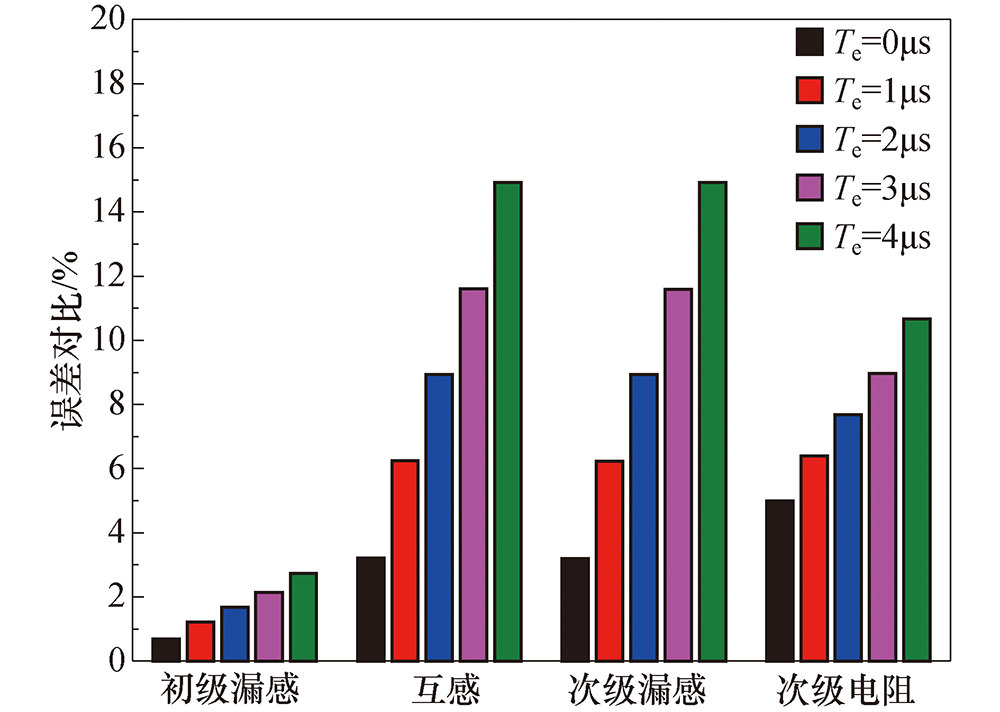 | 图11 各个参数辨识结果误差对比Fig.11 Comparison of identification result error |
从图11可知, 所有参数的辨识结果误差都在15%以内, 基本满足辨识精度的要求.但是死区效应的存在使得辨识误差增大, 且死区时间越大, 误差越大.当死区时间设置在2 μ s以内时, 所有参数的辨识误差可以控制在10%以内.另外, 死区效应对互感、次级电阻和次级漏感的辨识影响较大, 对初级漏感辨识的结果影响相对较小.
1)在考虑直线感应电机初级漏感和次级漏感不相等的情况下, 提出了一种利用PWM逆变器对直线感应电机进行单相实验, 从而辨识出电机等效电路参数的方法.
2)利用Ansys Maxwell搭建直线感应电机的三维有限元模型, 并通过Simplore搭建电压型逆变电路为电机提供所需要的单相直流电压、单相高频交流电压和单相低频交流电压, 在设置不同死区的条件下进行联合仿真, 说明死区效应使得电压波形产生畸变, 电压和电流幅值均减小.仿真过程中考虑到了PWM逆变电路的死区效应及直线感应电机的边端效应, 仿真过程更接近于实际应用.
3)将辨识结果与电机实际参数进行对比及误差分析, 可以得到死区效应使得初级漏感辨识结果增大, 互感、次级漏感和次级电阻辨识结果减小, 对初级电阻辨识则不产生影响.死区时间越大, 参数辨识的误差越大.另外, 死区效应对初级漏感的辨识影响较小, 而对互感和次级参数的辨识影响较大.
4)辨识结果验证了本文方法的正确性.同时, 当死区时间设置在2 μ s以内时, 辨识精度较高.所提出的参数辨识方法实施简单并且不需要使用额外的测量仪器, 在工业和交通领域具有较高的应用价值.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|