
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
智能网联车环境下异质交通流稳定性及安全性分析
[蒋阳升1a, 1b  , 胡蓉
, 胡蓉1a, 1b , 姚志洪1a, 1b, 2 , 吴培财3 , 罗孝羚1a, 1b ]
, 胡蓉|
|


第一作者:蒋阳升(1976—),男,湖南衡阳人,教授,博士.研究方向为交通系统优化. email: jiangyangsheng@swjtu.cn.
针对未来道路上由人工驾驶车辆(Human Driven Vehicles,HDVs)和智能网联车(Intelligent and Connected Vehicles, ICVs)所组成的异质交通流,对其稳定性与安全性进行研究.首先,利用全速度差模型(Full Velocity Difference, FVD)和协同自适应巡航控制模型(Cooperative Adaptive Cruise Control, CACC)分别描述人工驾驶车辆和智能网联车的跟驰特性.然后,通过分析不同智能网联车渗透率下异质交通流的线性稳定性,得出其稳定性条件.最后,采用数值仿真实验进行验证,选取多项安全指标评估了不同渗透率下异质交通流的安全性.结果表明:随着渗透率的增加,交通流的车速离散程度减小,即表示安全性能提高;安全指标降低比例减少,即表示交通安全风险降低.因此,智能网联车的应用有助于提高交通安全.
On future roads,the heterogeneous traffic flow will be composed of Human Driven Vehicles (HDVs) and Intelligent and Connected Vehicles (ICVs), focusing on which their stability and safety performance are studied in this paper. Firstly, the Full Velocity Difference (FVD) model and Cooperative Adaptive Cruise Control (CACC)following model are adopted to describe the car-following characteristics of the HDVs and ICVs. Then the stability conditions of heteroge neous traffic flow under different penetration rates of the ICVs are obtained by analyzing the linear stability. Finally, a numerical simulation of heterogeneous traffic flow is designed for verification, and the safety performance of heterogeneous traffic flow under different penetration rates is evaluated by multiple safety indexes. The results show that as the penetration rate increases, the dispersion degree of the vehicle speed in heterogeneous traffic flow decreases, which means that it becomes safer. The reduction ratio of the safety index decreases with the increase of penetration rate, which indicates the safety risk is reduced. Therefore, the application of ICVs can improve traffic safety.
近年来, 随着国家智能网联汽车发展的相关战略的提出, 智能网联车的研究[1, 2, 3]和规模化应用将对道路交通流产生巨大的影响.但最新研究表明[4], 2050年道路上智能网联车的渗透率仅能达到75%, 未来道路交通将会普遍呈现由人工驾驶车辆和智能网联车组成的异质交通流特征.因此, 研究该异质交通流的稳定性和安全性具有重要的理论和实践意义.
国外对于智能网联车环境下异质交通流安全性的研究起步较早.Lee等[5]经过实地真车实验进行自适应巡航(Adaptive Cruise Control, ACC)系统的交通安全性能分析, 证明ACC车辆可改善对前车轻微与中度刹车的车辆尾部碰撞安全隐患.Moon等[6]构建了ACC模型, 选取碰撞时间(Time-to-collision, TTC)进行交通安全评估, 指出ACC跟驰模型能使车辆与车辆间保持安全距离.Li等[7, 8]分别研究了CACC系统、ACC参数设置对于降低高速公路尾部碰撞风险的影响, 利用TTC的两个替代指标碰撞暴露时间(Time Exposed Time-to-collision, TET)与碰撞接触时间(Time Integrated Time-to-collision, TIT)评估碰撞风险, 表明CACC或者ACC渗透率的增加有利于提升安全效果.Jeong等[9]通过优化车辆操纵控制分析了异质交通流的碰撞风险, 表明自动驾驶车辆渗透率的提高有利于减少车辆碰撞.而在国内, 秦严严等[10, 11]分别考虑了网联辅助驾驶系统退化机制、控制输出的网联车辆(Connected and Automated Vehicles, CAV)反馈系数, 分析与优化了异质交通流的线性稳定性, 从而降低异质交通流中的车辆追尾风险.刘新雨等[12]利用驾驶模拟器进行实际道路驾驶实验, 比较分析了不同特性的驾驶员的应激反应, 指出ACC驾驶的安全性取决于驾驶员对于ACC的认知度.从以上分析可知, 研究混有智能网联车的异质交通流稳定性和安全性尤其重要.但现有研究仍存在以下两点不足:1)现有大多研究仅采用尾部碰撞风险作为单一指标来评价智能网联车环境下的异质交通流安全性, 评价指标单一.而现有研究表明, 采用多指标才能全面地评价异质交通流的安全性; 2)大多研究并未同时对混有智能网联车异质交通流的稳定性和安全性进行分析.
为解决该问题, 本文作者拟研究混有智能网联车异质交通流的稳定性, 得出异质交通流稳定时对应的智能网联车渗透率条件.同时, 引入多指标安全评价体系来全面地解析异质交通流的安全性, 弥补单一安全指标评估的不足.本文中采用的智能网联车环境为由智能网联车和普通车辆组成的混合交通流环境, 其中智能网联车之间可以相互通信, 且车辆采用自动控制模式, 与普通车辆的跟驰行为相比, 智能网联车具有更加高效和安全的跟驰特性.因此, 首先采用FVD模型[13]与CACC模型分别描述人工驾驶车辆和智能网联车辆的驾驶行为, 再在此基础上推导了异质交通流稳定性条件.然后, 利用数值仿真实验, 选取车速标准差(Standard Deviation of Speed, SD)、TET、TIT与追尾碰撞风险指数(Time Exposed Rear-end Crash Risk Index, TERCRI)[14]等多项安全评价指标来评估异质交通流的安全性.
FVD模型弥补了广义力模型与优化速度模型的诸多不足, 常被应用于人工驾驶车辆跟驰行为研究.其考虑了速度差项和车间距, 并通过实际数据对该模型进行了参数标定, 其模型为
式中:
车的速度差, m/s;
式中:
该模型的相关参数取值如表1所示, 其标定误差为4.02%[15].
| 表1 FVD模型参数的标定取值 Tab.1 Calibrated values of FVD model parameters |
相比较于其他的跟驰模型, CACC模型是基于恒定车间时距而未考虑其他驾驶策略的跟驰模型, 其是由加州伯克利大学PATH实验室通过真车测试实验, 基于真车数据, 更能真实地描述了CACC车辆恒定车间时距的跟驰特性.因此, 采用CACC模型描述智能网联车的跟驰行为, 其模型[7]的数学表达式为
式中:
对式(3)中的速度求导为
式中:
交通流稳定性是分析道路中出现的随机扰动对于交通流状态影响的重要方法.交通流不稳定容易引起交通堵塞, 进而使道路交通通行效率降低, 故稳定性分析对道路交通安全的评价至关重要.交通流非稳定状态时的条件[17]为
当交通流不满足稳定状态时, 满足式(5)中的条件.其中,
式中:
分别对人工驾驶车辆和智能网联车组成的同质交通流进行稳定性分析.首先, 将FVD跟驰模型式(1)带入式(6)求偏微分, 可得
式中:
同理, 将式(3)CACC模型带入式(6)求偏微分, 可得
式中:
利用交通流稳定状态时的判别条件, 可分别计算同质交通流中FVD模型非稳定性约束判别值
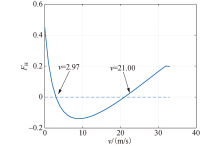
由式(9)计算可知, 当车辆速度在范围区间0~2.97 m/s与21~33 m/s内时, 由人工驾驶车辆组成的同质交通流处于稳定状态, 其稳定性判别值与车速值的关系如图1所示.
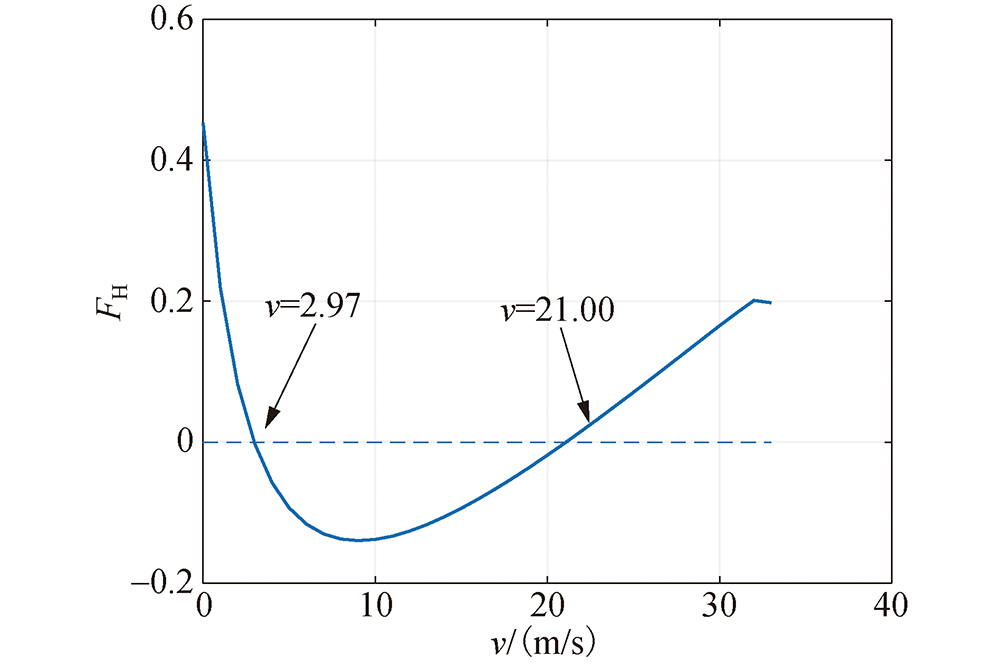 | 图1 FVD模型稳定性分析Fig.1 Stability analysis of FVD model |
同理, 将式(8)带入式(10)可计算智能网联车的稳定性判别值为
由式(11)可知, 由智能网联车组成的同质交通流的线性稳定判别条件取值为1.248, 恒大于0, 其稳定性判别值与车速无关, 故智能网联车在不同速度范围内均处于稳定状态.
异质交通流是由人工驾驶车辆和智能网联车组成的, 可推导得出异质交通流非稳定性条件[17]为
式中:
假设异质交通流中车辆总数为
由式(13)简化为
令
则式(14)可表示为
式中:
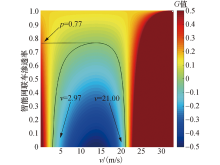
由式(17)的计算结果可知:异质交通流的稳定性与智能网联车渗透率存在一定的关系, 绘制出不同渗透率下的稳定值图, 如图2所示.其中, 黑色曲线表示在稳定值
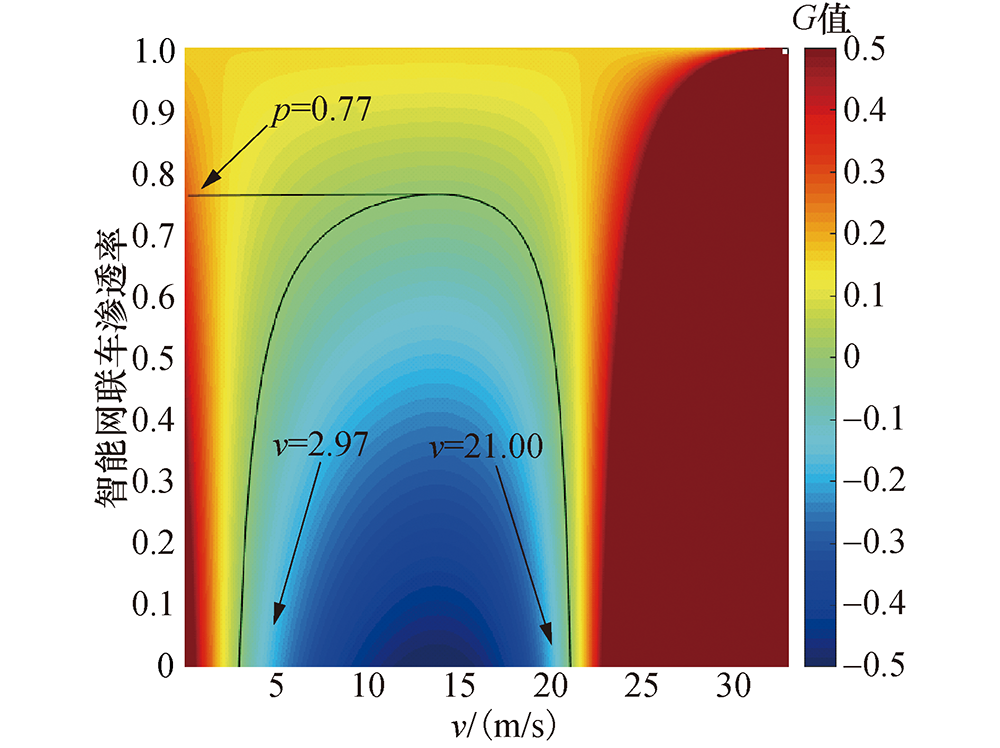 | 图2 异质交通流稳定性分析Fig.2 Stability analysis of heterogeneous traffic flow |
由图2知, 黑色曲线表示异质交通流处于稳定状态时的临界值
影响交通安全的因素涉及道路环境、车辆性能和人为因素等.现有研究采用微观交通安全指标对交通安全进行评价, 这些指标包括车速标准差SD、碰撞时间TTC和碰撞风险指数等.为全面评价混有智能网联车异质交通流的安全性, 本文拟采用SD、TET、TIT与TERCRI等4项指标来作为评估标准.
车速离散被广泛应用于估算交通安全程度, 通常采用车速标准差
式中:
碰撞时间TTC表示当保持速度差时, 前车与后车发生碰撞之前的剩余时间, 其表达式可表示为[6]
进一步, 基于该公式, 可计算TET和TIT两个安全性能指标
式中:
当前车速度骤减, 由于前后车辆之间的安全距离不足所造成追尾事故的危险程度采用TERCRI进行描述, 其表达式[14]为
其中,
式中:
为分析不同智能网联车渗透率条件下的异质交通流安全性, 参考文献[19], 不考虑车辆换道行为, 采用数值仿真实验模拟单车道中车辆的跟驰行为, 其中仿真路段长度为6.5 km, 路段中间为匝道汇入, 主路和匝道上游交通需求分别为1 700 veh/h和360 veh/h.车辆到达采用泊松分布模拟, 产生车辆的同时产生1个在[0, 1]之间的随机数.若随机数不大于给定的渗透率, 则该车辆采用智能网联车的跟驰模型; 否则为人工驾驶车辆的跟驰行为.仿真时长为1 h, 仿真精度为0.1 s, 前5 min为仿真预热时间.所有仿真实验均在数值仿真软件Matlab中实现, 仿真实验电脑配置为Intel 3.60 GHz CPU和8 GB运行内存.为探讨智能网联车渗透率对交通流安全的影响, 分别仿真渗透率为0%、20%、40%、60%、80%和100%等6种场景.同时, 为避免仿真实验随机性的影响, 每种场景采用不同的随机种子各仿真3次, 取仿真结果的平均值作为最终结果.最后, 根据仿真数据计算对应渗透率下的安全指标.依据计算结果判断不同渗透率下异质交通流的安全性.
获取仿真数据后, 可由式(18)计算6种智能网联车渗透率下的
| 表2 不同渗透率下SD的平均值 Tab.2 SD average under different penetration rates |
由表2可知,
同时, 考虑到阈值
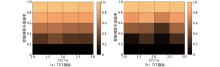
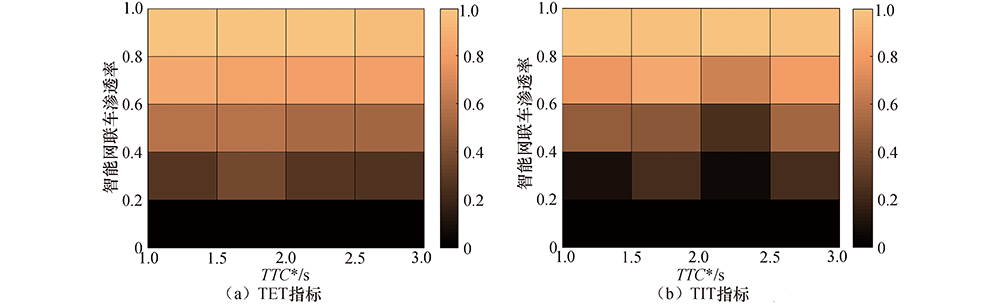 | 图3 TET和TIT指标降低比例的热力分析Fig.3 Thermal analysis of indexes TET and TIT reduction ratio |
由TET和TIT指标降低比例的热力图分析可知, 随着渗透率的提高, TET与TIT指标值降低的比例越大, 代表着交通安全风险越小.为更形象地描述不同
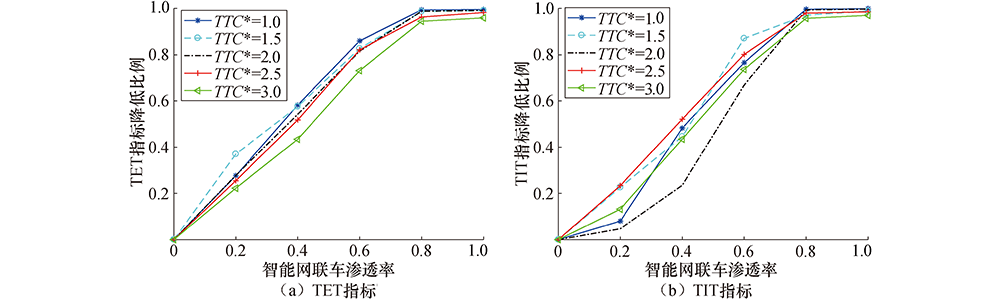 | 图4 碰撞时间TET和TIT指标降低比例Fig.4 Reduction ratio of indexes TET and TIT |
当阈值变化时, 虽然TET与TIT降低比例范围有一定波动, 但是整体趋势一致, 均随着渗透率增加而增加.当全部为智能网联车, 两项指标降低比例最大, 故阈值取值大小对安全指标的计算影响较小.依据仿真实验结果, 由式(23)计算前后车辆停车距离, 进而分析车辆追尾碰撞风险TERCRI指标相对于渗透率为0时所降低的比例, 可绘制不同渗透率下的降低比例变化曲线图, 如图5所示.
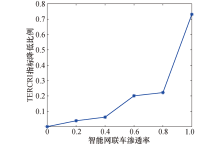
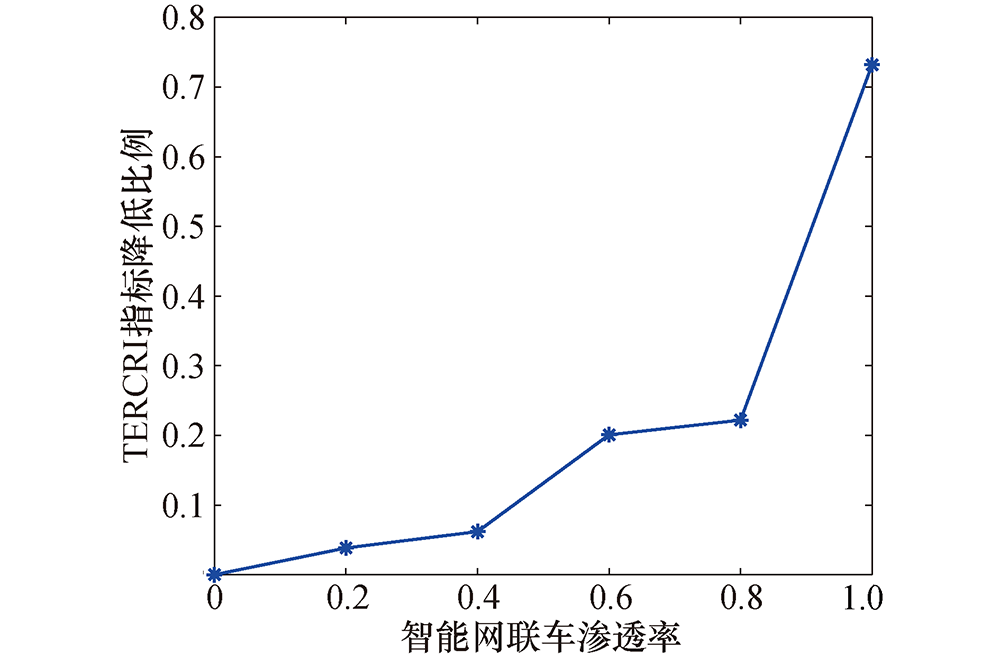 | 图5 TERCRI指标降低比例趋势Fig.5 Reduction ration changing trend of index TERCRI |
由图5可知, 车辆之间处于不安全距离的风险随着渗透率增加而逐渐降低, 且当渗透率大于80%时, 降低效果更明显.这也表明智能网联车的应用能够有效改善交通流的安全.
1)在同质交通流中, 人工驾驶车辆的交通流稳定速度区间为0~2.97 m/s和21~33 m/s; 而智能网联车在不同速度区间下均处于稳定状态.
2)当智能网联车渗透率大于77%时, 异质交通流不受速度区间的影响, 均处于稳定状态.
3)车速离散值随着渗透率的增加而降低; TET、TIT与TERCRI指标降低比例随着渗透率增加而提高; 当智能网联车渗透率大于80%时, 车速离散值较小, 车辆尾部碰撞风险明显降低, 安全性能大大提高.这些指标均表明智能网联车能够有效地提高交通安全, 为未来智能网联车环境下的交通安全管理提供一定的理论参考.
4)不同TTC阈值条件下, TET与TIT整体趋势一致, TTC阈值对于实验结果的影响较小.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|