



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
铁路安全应用卫星导航信号空间可信区域识别方法
[靳成铭a  , 蔡伯根
, 蔡伯根a, b , 王剑a, b, c , 上官伟a, b, c ]
, 蔡伯根|
|


第一作者:靳成铭(1987—),男,河南新郑人,博士. 研究方向为交通信息工程及控制. email:13111045@bjtu.edu.cn.
卫星导航系统作为一种信息源,在铁路安全苛求系统中应用时需满足相应的可用性需求. 针对铁路遮挡环境下导航卫星空间信号的可用性评估问题, 提出了一种基于禁忌搜索的8-邻域区域生长算法,并得出可信的卫星导航信号可用区域.在此基础上,设计了一套铁路导航定位应用环境下的空间信号本地可用性分析方案,并进行了实验验证.结果表明,在所选取的四个场景中,本文所提出的算法能够有效降低将遮挡识别为可见天空的风险,算法将可见天空识别为遮挡的误识率低于6.9%,漏识率低于2.1%,并支持风险等级的进一步降低,为铁路安全苛求系统提供可信的“保守”空间信号可用区域.
Satellite navigation system is one information source, when it’s adopted in safety-critical applications in railways, the availability has to be required. Aiming at solving satellite navigation signal availability issue on the context of railway environment masking, this paper proposes a taboo-based 8-neighbors region growing algorithm, which can assess satellite real availability effectively. Based on the proposed algorithm, a satellite real availability assessment device in railway navigation application environment is designed. The on-site experiments show that, in the selected scenarios, the proposed algorithm is able to reduce the risk of identifying the masking as available sky, the false identification rate is less than 6.9%, meanwhile the missed detection rate of identifying the masking as available sky is better than 2.1%, in addition, it supports to decrease the risk to lower level. It also reveals that the proposed algorithm can provide dependable and conservative space signal availability for railway safety-critical applications.
国际电工委员会颁布了针对铁路系统的国际标准IEC 62278, 规范了铁路系统设备从研发到废弃的整个生命周期中, 对系统可靠性、可用性、可维护性和安全性(Reliability, Availability, Maintainability, and Safety, RAMS)的指标要求.可用性作为其中一项重要的指标参数, 通常采用实际可用的时间与全运行时间的比率来表征.
全球导航卫星系统(Global Navigation Satellite System, GNSS)用于定位时, 其可用性受星座几何形状的影响, 国际上先后出现了Trimble Planner、GNSS Radar等卫星可用性分析预测工具.为提高结果的可信度, 需要考虑本地遮挡情况.其中一种方法是将接收机放置在待测地点, 长时间运行获取足够多的数据, 以后处理的方式评估可用性.另一种方法是对应用环境进行3D建模, 模拟出信号的可用性.上述方法耗时耗力, 结果可信度难以保证.文献[1, 2]提出了利用鱼眼镜头采集图像分析卫星星座的遮挡情况, 首次分析了使用一次折射信号对于定位结果的影响, 并提出了使用单一“ 鱼眼镜头” 构建本地真实的可见天空范围, 进而剔除折射信号及卫星的方法, 开发了铁路应用工具PREDISAT, 用于GALILEO系统的可用性评估.文献[3]使用聚类算法对鱼眼镜头采集的图像进行分类, 确定天空和非天空区域.文献[4]在上述方法基础上提出了一种基于K平均的分类方法, 使用Fisher算法对天空和非天空进行分类[5], 准确率为97.4%, 仍存在将非天空识别为天空的风险.文献[6, 7, 8]分析了使用鱼眼镜头对于非视距(Non-Line-of-Sight, N-LOS)信号的检测和排除性能, 但其性能的改善依赖于3D地图数据库.文献[9]针对单鱼眼图像处理受云层、天气状态等影响较大的问题, 提出了使用连续图像跟踪目标区域的方法, 但侧重于评价非视距卫星对定位精度的影响.文献[10]针对复杂城市峡谷环境, 使用多张图像生成鱼眼天空图像, 基于灰度处理确定可见天空, 识别率在70%以上, 无法满足高可信的应用需求.
在铁路安全应用中使用鱼眼镜头获取可见天空时应最大限度降低直至避免将非天空识别为可见天空的风险, 上述方案均不能满足这一要求.本文作者首先介绍了铁路安全应用对于GNSS空间信号可用性信息的需求和图像处理基本原理, 提出了一种能够识别GNSS信号真实可用性的图像处理算法, 从而降低应用风险, 算法识别的可见天空区域是高可信的, 并给出了适用于铁路安全应用的可用性分析方案, 最后验证了算法的适用性和方案的可行性.
GNSS在铁路领域的安全苛求应用必须满足IEC 62278等相关标准中关于安全性、可靠性、可用性和可维护性的要求.GNSS空间信号(Signal in Space, SIS)作为卫星导航系统的重要组成部分, 对于定位结果有着直接影响.使用带有“ 多径效应” 的GNSS空间信号可使得定位精度在未经告警的情况下降级, 产生危险风险.在基于GNSS的铁路安全应用中, 所提供的可用性信息必须是高可信的.
卫星导航系统通常给出的可用性指标为空间信号可用性, 包括SIS单星可用性、SIS星座可用性.SIS单星可用性表征了该卫星播发健康信号的概率.同传统的航空应用不同, GNSS空间信号在铁路应用中除受卫星数量、几何结构等导航系统本身因素影响, 应用环境中的人为和自然环境造成的信号遮挡也是进行空间信号可用性评估时不可忽略的因素.
卫星导航系统SIS本地可用性定义为接收机在特定位置接收到不少于4颗可用导航卫星的最小概率.空间信号本地可用性包括了本地使用环境的影响, 反映了卫星信号的真实可用性.具体公式如下
式中:
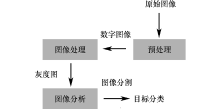
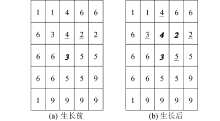
图像分析流程如图1所示.基于鱼眼镜头的卫星导航信号空间可用性分析本质上是一种图像分析方法, 即对图像中的可见天空区域进行检测和测量.邻域区域生长是一种重要的图像分割技术, 其思路是从一组生长点为起点, 将与该区域灰度值相似的像素点与生长点合并, 形成的新的区域作为新的生长点, 重复此过程直至完成整个图像的处理.以8-邻域区域生长算法为例, 如图2所示, 设置灰度值为3的像素点为生长点, 检查其周围8个邻域像素的灰度值, 将相近的灰度值所在像素点合并形成新的生长点, 然后重复该步骤直至完成所有像素点的生长.
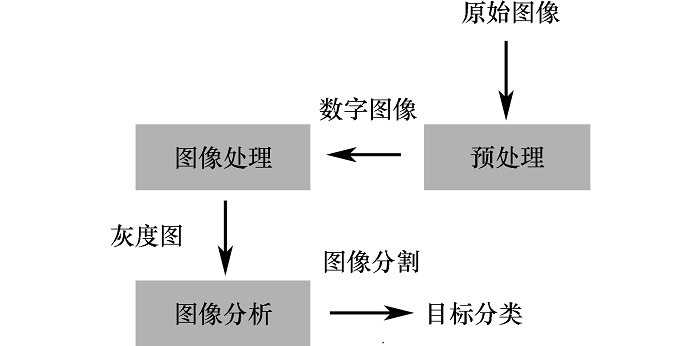 | 图1 图像分析流程Fig. 1 Flow chart of image analysis |
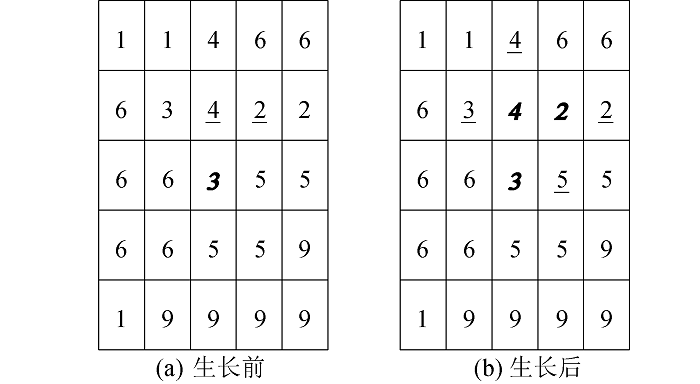 | 图2 8-邻域区域生长原理Fig.2 8-neighbors region growing algorithm |
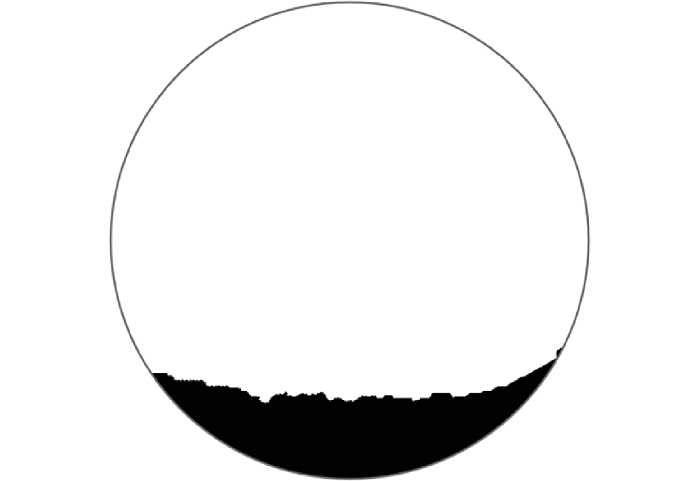
鱼眼镜头采集的图像如图3所示, 传统基于邻域生长算法所得目标边界如图4所示, 算法能够排除白云的干扰, 准确识别可见天空区域, 但由于在灰度图中建筑物与天空灰度值相近, 被错误地判定为天空.传统算法用于铁路安全应用中识别可见天空, 不可避免会将非天空区域“ 误判” 为可见天空, 存在应用风险.能够获得这样一种算法, 具备基于邻域的区域生长算法的优点, 并符合铁路安全应用中关于可见天空识别的高可信需求.
 | 图3 鱼眼镜头原始图像Fig.3 Original image of Fish-eye camera |
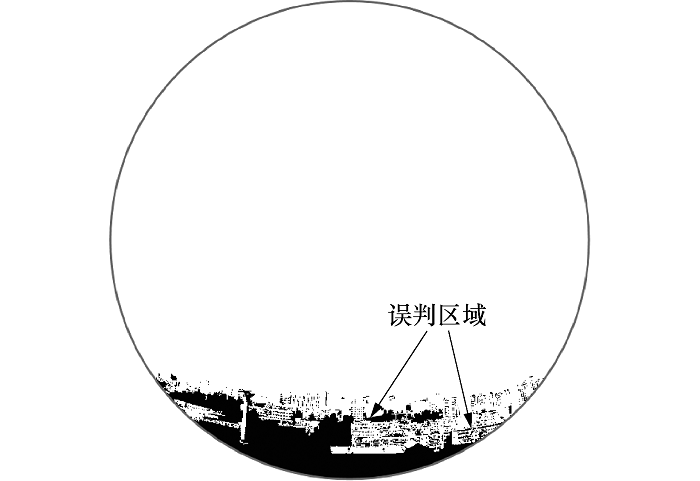 | 图4 传统的邻域生长算法结果Fig.4 Results of traditional neighborhood growth algorithm |
在传统算法中, 由于算法定义必须完成所有像素点的搜索和比较, 不可避免将生成多个目标边界, 导致算法所得可见天空范围大于真实的可见天空.本文所提出的改进算法引入禁忌搜索(Taboo Search, TS)的思想, 并充分利用鱼眼镜头桶形畸变的特性, 当算法判定某个像素点
TSA的设置方法为:图像中心像素点
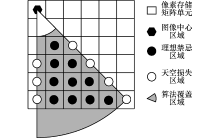
图5解释了禁忌区域设置的原理, 由于桶形畸变, 遮挡物从顶端到地面的剖面被分配到图5中灰色圆点所在的像素单元格, 而且越是远离图像中心, 遮挡被分配的像素单元格越多.因此, 想要识别该区域, 合理的方式为引入扇形禁忌区域, 离图像中心点越远, 则禁忌的区域越大.扇形禁忌区域的大小除受目标边界点位置影响, 还同所选取的圆心角角弧度有关.在所提出的算法中, 目标边界点由8-邻域区域生长算法决定, 而圆心角的角弧度, 即斜率
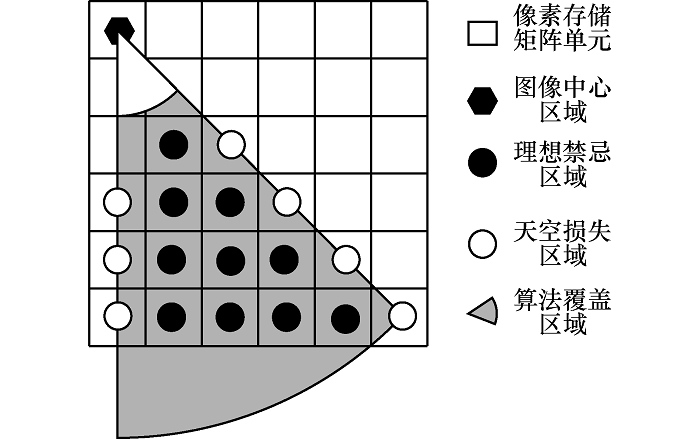 | 图5 禁忌区域示例Fig.5 Example of Taboo area |
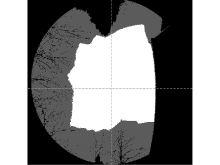
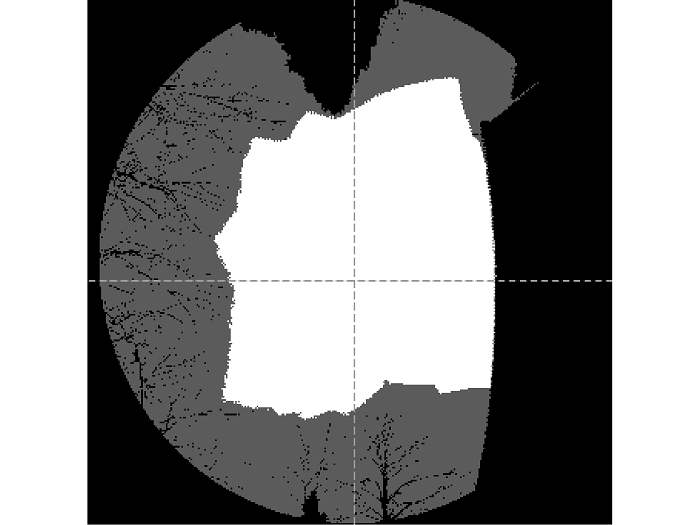
基于上述改进算法对1.2节的图像处理, 结果如图6所示.通过同图 4的比较可知, 改进算法有效地将传统算法中的“ 误判区域” 判定为禁忌搜索区域, 从而将其识别为遮挡区域, 同时保留了绝大部分可见天空区域, 最终输出以降低可见天空区域出现遮挡为目标的图像分析结果.
 | 图6 基于禁忌搜索的区域生长算法结果Fig.6 Results of taboo-based region growing algorithm |
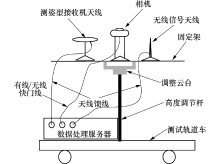
针对铁路应用现场环境的特征, 本文所设计的分析装置见图7, 装置使用鱼眼镜头模拟安装在列车顶部的GNSS天线, 采集测试点处的天空图像, 测姿型接收机实时获取装置运动的姿态信息, 将图像中的方位角与实际的真北角对应起来.高度调节杆始终同轨道平面垂直且高度低于列车车顶GNSS天线实际高度, 以获得保守的计算结果.接收机实时获取镜头所在的位置坐标, 接收机和图像采集装置的时间同步由数据处理服务器完成, 服务器同时包含无线通信模块, 以实现车地间数据的无线传输.
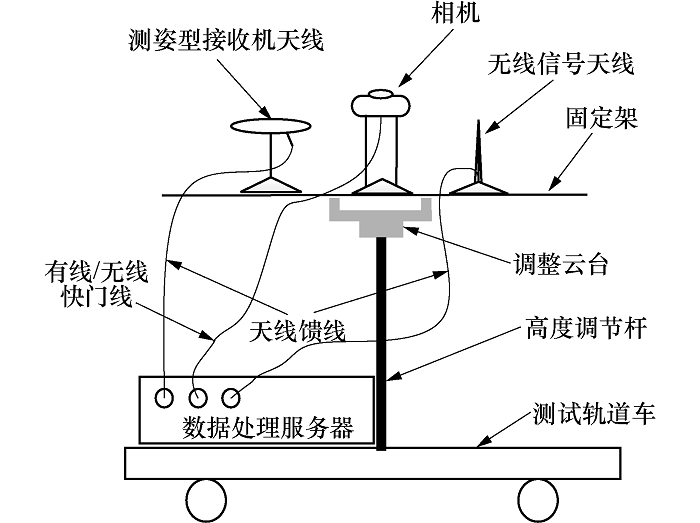 | 图7 铁路应用可用性分析装置示意Fig.7 Sketch map of availability analysis device in railways |
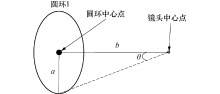
鱼眼镜头拍摄的图像存在畸变, 因此需要对镜头进行标定, 标定的精度直接影响图像处理后对SIS本地可用性计算的精度.标定平台如图8所示, 将镜头中心点同显示器示意的图像中心点设置在水平面上, 且两中心点之间距离
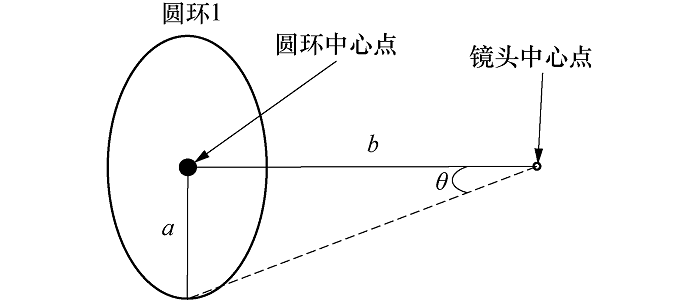 | 图8 标定示意Fig.8 Calibration example |
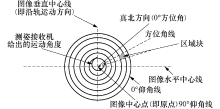
根据鱼眼镜头标定的信息, 结合方向角信息可以得到图像垂直中心线同真北方向的夹角, 进而得到测量点处图像中不同仰角和方向角区域的绝对信息.如图9所示.图像分割算法提供可见天空区域, 从映射后的图像中排除掉那些被遮挡的区域, 剩下区域即为可见天空的仰角和方向角范围.根据事后获得的广播星历或者精密星历, 结合已知测量点的绝对位置信息, 可以获得该点24 h内, 可见卫星数的变化情况, 根据式(1)即可计算卫星导航系统SIS本地可用性.
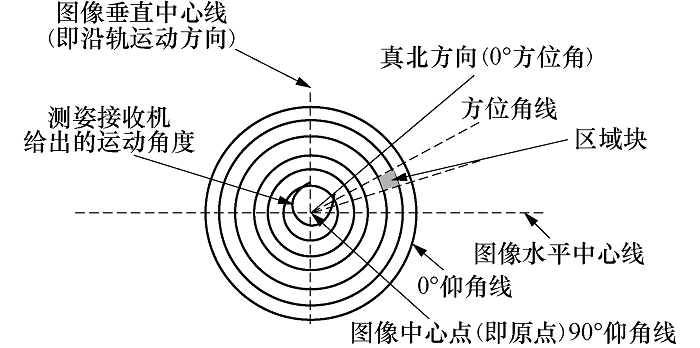 | 图9 图像中仰角和方位角区域的映射Fig.9 Elevation and azimuth area mapping |
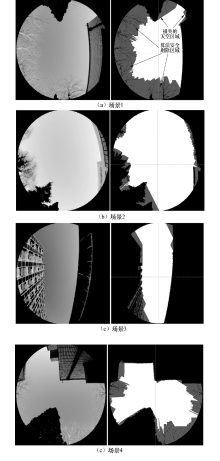
真实的铁路应用环境要比之前所示例的环境复杂, 包含建筑、树枝等遮挡, 为验证所提出算法的可行性, 本文选取了若干典型应用场景, 天空包含复杂遮挡, 而且遮挡物形状不规则, 尤其是树枝的遮挡, 增加了图像分析的难度.在列车运行过程中, 遮挡多存在于轨道两侧, 这与实验所选取的场景类似.
图10为基于8-邻域的区域生长算法处理后的结果, 其中黑色区域为传统算法处理结果, 灰色区域则为改进后的算法处理所得遮挡区域.
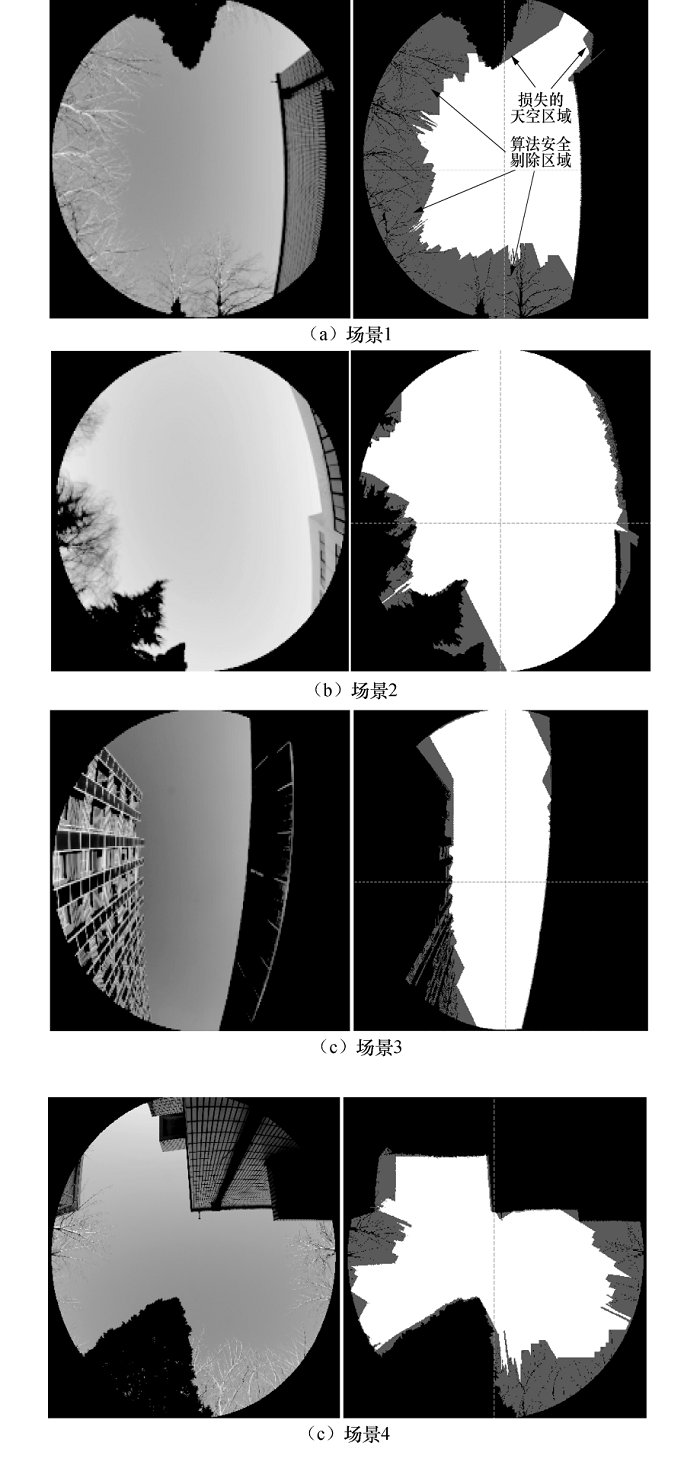 | 图10 测试场景Fig.10 Testing scenarios |
图11为传统8-邻域区域生长算法处理后的结果, 其中底图为采集的图像, 灰色区域为算法处理后得到的遮挡区域.对比可知, 改进算法对于树枝等复杂形状构成的非连续性遮挡有非常好的识别能力, 如图10中“ 损失的天空区域” 所示, 算法“ 保守” 地估计了可见天空范围, 降低了将树枝等遮挡识别为可见天空的风险, 同时损失了部分可见天空.定义算法将可见天空判定为非天空的区域同总的图像面积之比为误识率, 将遮挡判定为可见天空的区域同总的图像面积之比为漏识率, 同时定义树枝及邻近区域为遮挡区域, 则不同实验场景的误识率和漏识率统计结果如表1所示.
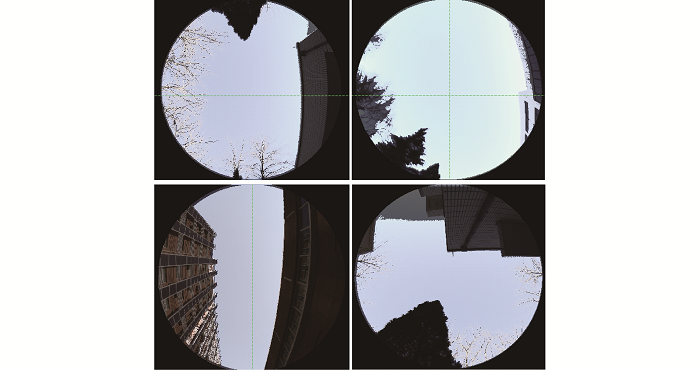 | 图11 传统的8邻域区域生长算法结果Fig.11 Traditional 8-neighbors region growing algorithm |
| 表1 可见天空的识别 Tab.1 Recognition of available sky % |
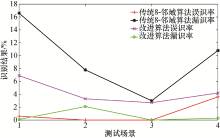
图12总结了传统8邻域算法和改进算法的识别结果, 由于改进算法对于树枝等遮挡较好的处理, 使得可见天空识别后的漏识率大大降低, 这是以牺牲误识率为代价. 误识率的高低同禁忌搜索区域设置的大小成正比, 本文所提的算法支持设置不同大小的禁忌搜索区域, 以满足不同等级的风险需求.图13为当选取更大的禁忌搜索区域时, 可见天空的损失情况, 对比可知算法误识率增高, 但漏识率随之下降.
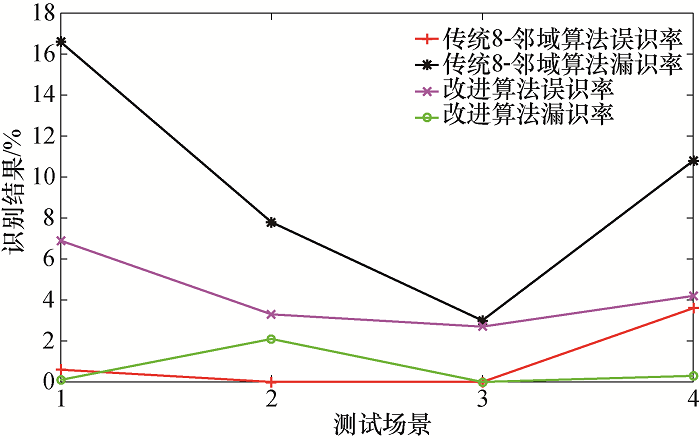 | 图12 算法结果对比Fig.12 Comparisons of different algorithms |
 | 图13 过多损失的天空Fig.13 Excessive loss of sky |
为验证导航卫星空间信号可用性分析方案的可行性, 实验场景选择在某铁路单位机务段停放列车机车的机库门口, 机库的遮挡可以部分屏蔽空间信号, 便于结果分析.具体设置如下:
1)镜头放置在铁轨中心线处, 并与铁轨平行;
2)使用接收机静态采集铁轨上的两点处的GPS空间信号, 后处理获得两点位置;
3)后处理计算两点所在直线同真北方向的夹角, 通过镜头与铁轨的对应关系计算得到鱼眼镜头采集图像的垂直中心线所表示的绝对方向角;
4)垂直放置相机, 使用相机采集天空图像, 采用所提出的改进算法后处理得到可见天空区域;
5)将接收机放置在相机位置, 静态采集GPS空间信号, 后处理得到可用卫星的状态;
6)已知相机位置信息、可见天空区域, 使用精密星历预测已知位置可见卫星的状态;
7)比较5)和6)结果, 验证所设计装置的预测结果.
由于接收机后处理得到的位置精度对于结果有较大影响, 本文所有接收机采集数据的后处理均使用精密单点定位技术(Precise Point Positioning, PPP).与传统的差分定位方式不同, PPP不需要地面参考基站辅助, 利用GNSS载波相位和码观测值, 以及高精度的轨道和钟差产品, 同时对影响解算精度的其他误差源进行改正, 可达到静态下厘米级精度.
实验采集1 h数据, 表2给出了由接收机解算得到的卫星状态(真实状态), 以及后处理可用性分析装置给出的卫星状态(装置预测状态), 其中PRN表示卫星编号.实验期间, 在9颗GPS可见卫星中, PRN 29号卫星由遮挡向可见天空方向运行, PRN 10和18号卫星始终处在遮挡位置不可见, 其余卫星始终可见.
| 表2 卫星可见结果 Tab.2 Satellite availability results |
1)针对铁路安全应用对于导航卫星空间信号可用性分析结果的高可信要求, 提出了一种基于禁忌搜索的图像处理算法, 能够从图像中有效地识别可见的天空区域, 且以牺牲部分可见天空来保障被识别为可见天空的区域的高可信性.
2)4个实验场景中, 将可见天空识别为遮挡的误识率低于6.9%, 将遮挡识别为可见天空的漏识率低于2.1%, 并支持风险等级的进一步降低.
3)选择一处铁路应用场景实验, 结果表明所设计的适用于安全苛求应用的可用性分析方案能够提供“ 保守” 的可见卫星状态, 从而提供可信的SIS可用性信息.
选取的4个实验场景接近列车运行过程中遮挡物多处于轨道两侧的真实环境, 可用性分析实验则选择真实的列车应用环境, 为后续开展列车搭载实验, 在真实的列车运行过程中评估和改进算法提供了依据.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|