
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于能耗优化的前后轴独立驱动电动汽车转矩分配策略
[姜涛 , 耿聪, 薛奇成, 张欣]
, 耿聪, 薛奇成, 张欣]
, 耿聪, 薛奇成, 张欣]
|
|


第一作者:姜涛(1994—),男,湖北枝江人,硕士. 研究方向为电动汽车能耗优化.email:16121377@bjtu.edu.cn.
为减小前后轴独立驱动电动汽车的整车能耗,提出了一种基于能耗优化的转矩最优分配策略.首先分析前后轴独立驱动电动汽车驱动功率消耗的特征,提出以前后电机总损失功率为目标函数的转矩分配系数计算方法,进而建立转矩优化分配计算的数学模型;然后利用Matlab进行非线性优化问题的求解得到用于转矩优化分配控制的转矩分配系数MAP图;最后利用AMEsim与Simulink建立联合仿真平台,并进行典型驾驶循环下不同转矩分配策略的对比仿真试验分析.结果表明,转矩优化分配策略能够明显减少驱动情况下的能量消耗,提高制动情况下的能量回收,因此提高了整车经济性.
In order to reduce the energy consumption of the electric vehicle driven by the front and rear axles independently, an optimal torque distribution strategy based on energy optimization is proposed. Firstly, the characteristics of the drive power consumption of the front and rear axle independently driven electric vehicles are analyzed. The total loss power of the front and rear motors is used as the objective function of the calculation method of the torque distribution coefficient, and then the mathematical model of the torque optimization distribution calculation is established. Then the nonlinearity is calculated by Matlab. The optimization problem is solved by the torque distribution coefficient matrix used for torque optimization distribution control. Finally, the joint simulation platform is established by AMEsim and Simulink, and the comparative simulation analysis of different torque distribution strategies under various typical driving cycles is carried out. The results show that the torque optimization allocation strategy can significantly reduce the energy consumption under driving conditions and improve the energy recovery rate under braking conditions, thus improving the system energy efficiency of the vehicle.
面对能源危机和环境污染的双重压力, 发展各种类型的高效电动汽车[1]已上升到国家战略层面.其中, 前后轴独立驱动电动汽车(Front-and-Rear-wheel-Independent-Drive-type Electric Vehicle, FRID EV)由于具有良好的动力性、经济性和安全性等优势[2, 3, 4], 已成为电动汽车领域新兴的研究热点.目前, 针对前后轴独立驱动电动汽车的研究主要集中在车辆的转矩分配方面, 通过基于不同的目标对转矩进行分配, 包括基于安全性的转矩分配[5, 6, 7, 8]和基于经济性的转矩分配[9, 10, 11, 12].其中, 基于经济性的转矩分配通过合理的分配前后电机转矩, 使前后电机分别工作在高效率区, 从而降低整车能量消耗.基于经济性的转矩分配主要分为两种:
1)基于电机效率特性, 以整车能量利用率最高作为目标函数制定的转矩分配策略[13]:文献[14]分别以驱动和制动情况下效率特性为基础, 将前后电机的转矩分配系数作为控制变量, 提出以系统效率最大化为目标的转矩分配方法.文献[15]提出了一种改善冗余执行系统能量利用率的控制方案, 将车轮转矩作为控制变量, 将电机的效率作为目标优化函数, 控制各个电机的转矩分配使能量消耗达到最小.这种方法仅以电机效率为基础, 而未考虑非工作电机的空载功率损耗对整车能耗的影响.
2)基于电机控制原理, 建立详细的电机损耗模型从理论上推导出转矩最优分配[16]:文献[17]利用电机效率特性定义出电机功率损失函数, 并以电机功率损失最小为目标提高电动汽车的整车能量利用率.文献[18]建立了详细的电机损耗模型, 并基于该模型对驱动系统进行损耗分析, 推导出转矩分配优化分配问题的理论最优分配方案.这种方法需要获得电机内部详细构造数据, 以此来建立电机铜损、铁损、逆变器损失等损耗模型.而电机内部许多参数不容易获得, 所以这种方法不容易实现.
综合以上两种方法的优缺点, 本文作者利用较容易获得的电机效率MAP图为基础, 考虑到非工作电机的空载损耗功率, 提出以前后电机总损失功率为目标函数的转矩最优分配策略, 并与传统未考虑电机空载损耗功率的转矩分配策略进行对比分析, 结果表明本文提出的转矩优化策略能进一步提高电动汽车的整车经济性.
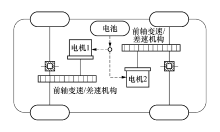
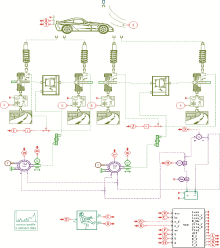
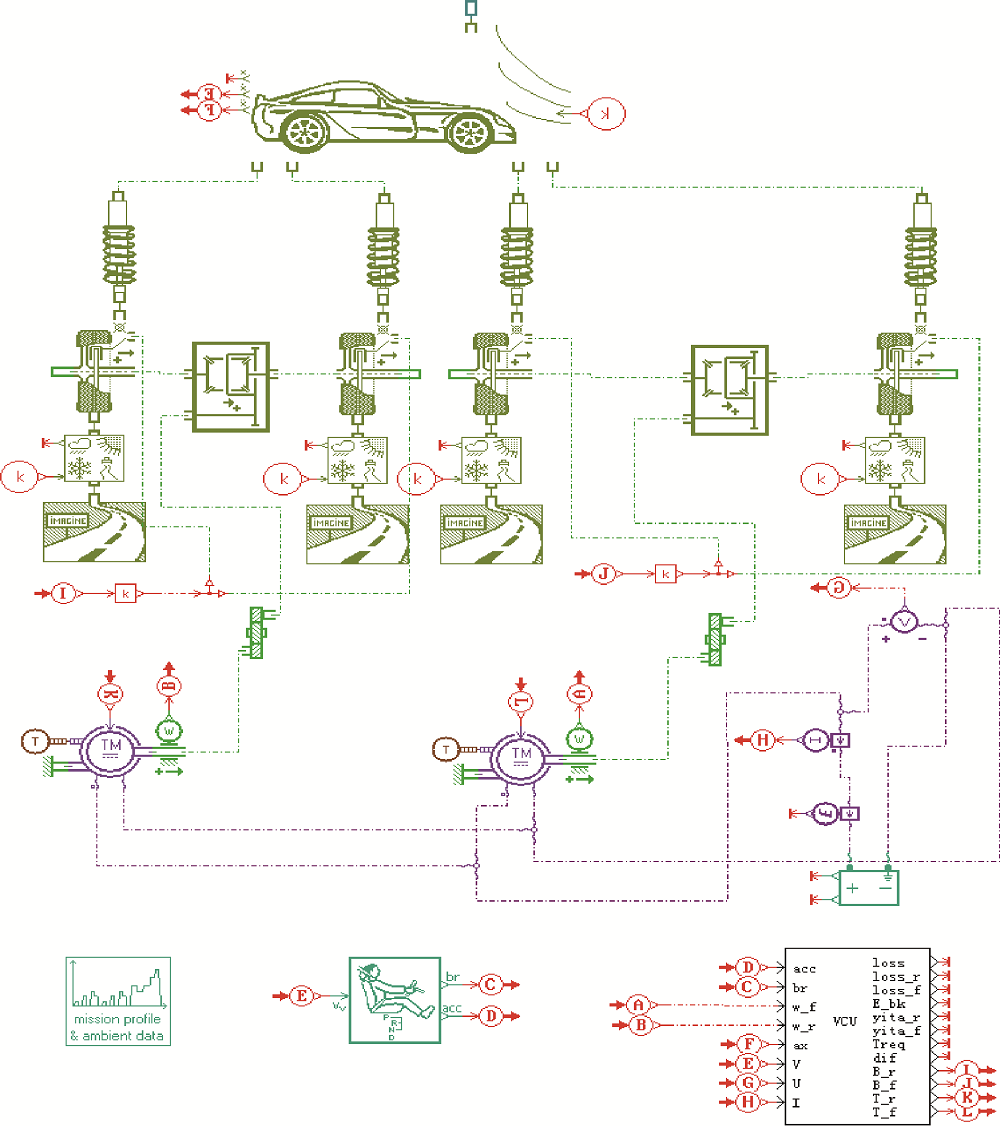
前后轴独立驱动电动汽车的前后轴是由两个独立的电机分别驱动的, 其动力系统结构如图1所示.其中, 汽车前后轴电机的动力分别通过减速器和差速器等传输到前轮和后轮.仿真模型参数见表1.
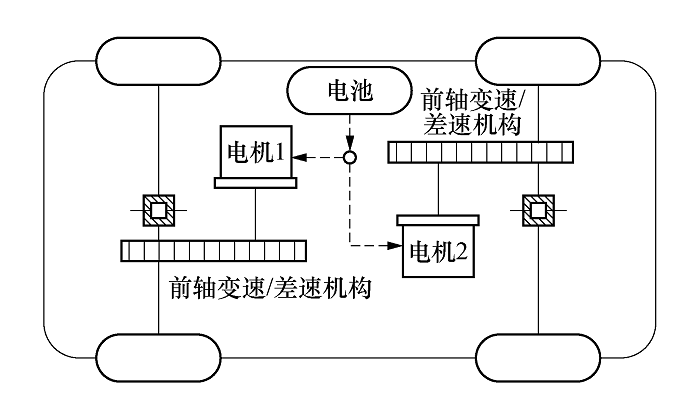 | 图1 前后轴独立驱动电动汽车结构Fig.1 FRID EV configuration |
| 表1 仿真模型参数设置 Tab.1 Simulation model parameters setting |
前后轴电机的转矩分配可以抽象为前后轴电机转矩分配系数的确定问题.转矩分配系数定义为
式中: $T_f$, $T_r$ 分别为前电机和后电机的转矩值; ${T}_{total}$为由加速踏板解析出的前后电机总需求转矩值.
转矩分配系数
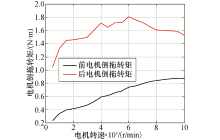
图1中在电机与车轴间并没有离合器, 所以当整车处于单电机驱动模式时, 存在非工作电机被整车拖转的情况, 而非工作的电机旋转时也有损失.
电机倒拖转矩
式中:
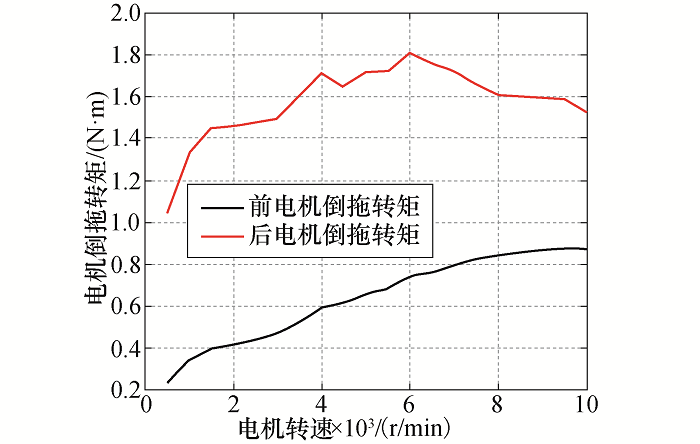 | 图2 前后电机倒拖转矩Fig.2 Drag torque of front and rear motor |
由于本文是研究驱动力在轴间不同分配方法的能耗高低, 所以将电池等部件的效率视为相同.因此将电机效率作为主要考虑的因素, 并且考虑到非工作电机的倒拖损耗功率, 所以将单电机驱动和双电机驱动模式下统一用前后电机总损失功率作为转矩最优控制的目标函数.
根据电机在驱动情况和制动情况下的能量流向的特点, 分别得出驱动情况和制动情况下的电机损失功率.
驱动情况:
制动情况:
式中:
假设汽车在直线良好路面行驶, 车轮转速均相同, 为方便讨论, 以下所建立的前后轮转矩分配模型将基于同侧1/2车辆模型[20].由于前后减速器的传动比相同, 所以前后电机转速相同.由式(3)和式(4), 建立驱动/制动情况下的电机总损失功率模型为
式中:
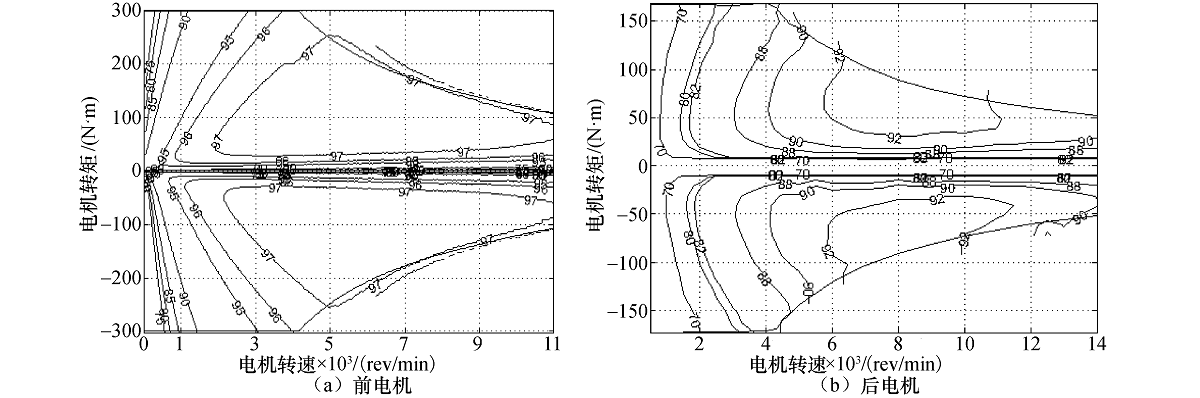 | 图3 电机效率MAP图Fig.3 Efficiency map of front motor |
考虑非工作电机的空载损耗, 由电机空载损失功率式(2), 需要对目标函数进行如下修正:当
式中:
由上述确定的电机总损耗功率最小为目标函数可以看出, 任意总需求转矩
进而得出转矩最优分配控制的数学模型:
目标函数:
控制变量:
约束条件:
式中:
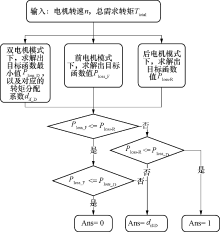
根据上述提出的数学模型, 利用电机效率MAP图进行离线状态下转矩分配系数的求解.求解流程图如图4所示:首先在双电机模式下, 对不同转矩分配系数下的电机总损失功率进行求解, 得出电机总损失功率的最小值
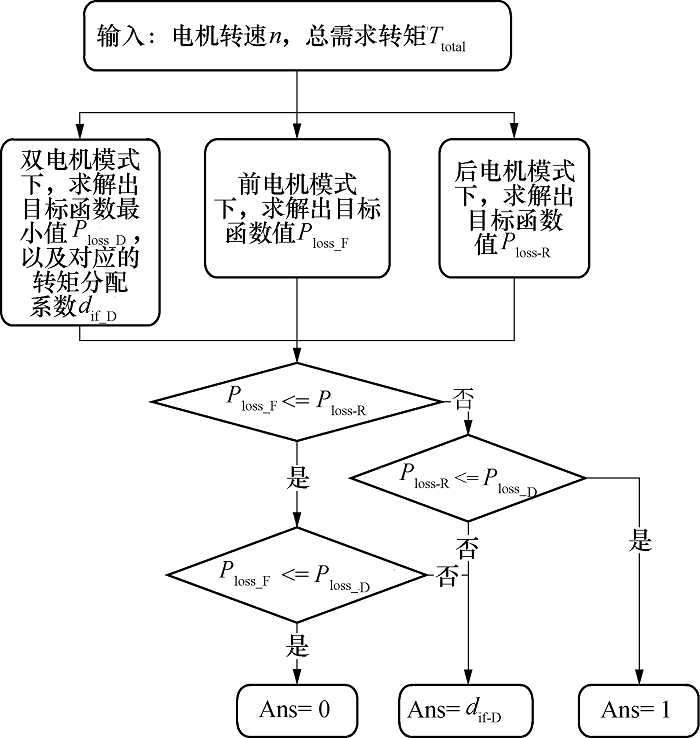 | 图4 算法流程Fig.4 Flow chart of the algorithm |
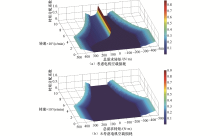
根据图4, 分别对以式(5)、式(6)为目标函数和以式(7)、式(8)为目标函数进行求解, 利用数值计算得到考虑电机空载损耗和未考虑电机空载损耗两种目标函数下, 不同总需求转矩和转速下的转矩分配系数
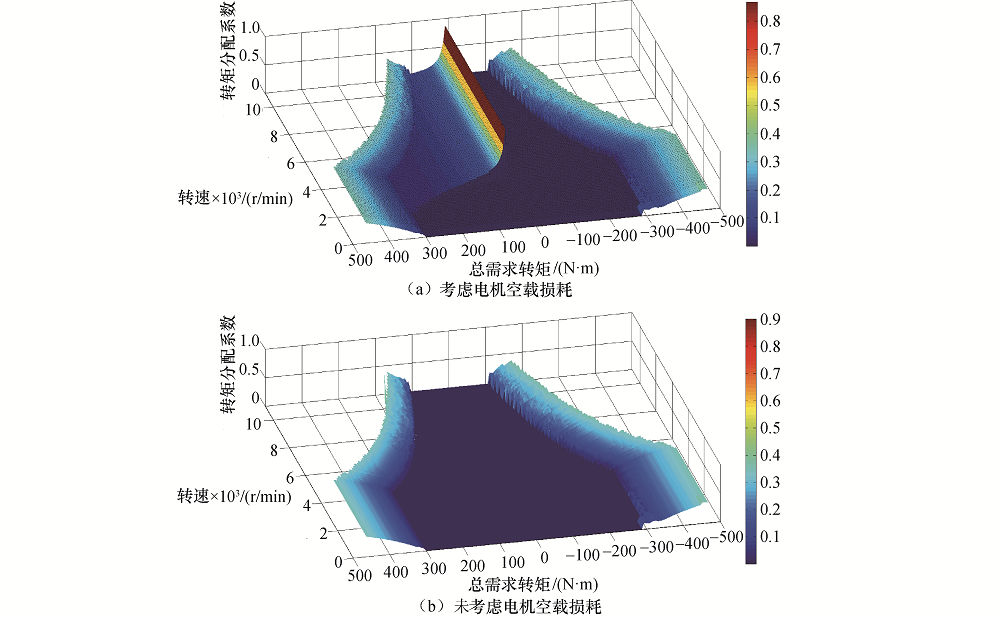 | 图5 不同目标函数优化结果的转矩分配系数三维图Fig.5 Map of torque distribution coefficient |
从优化结果可以看出:
1)在不考虑电机空载损耗时, 优化分配结果主要与总需求转矩和电机转速有关, 总需求转矩影响较大, 电机转速的影响相对较小.当总需求转矩较小时, 转矩分配系数为零, 即由前电机驱动时整车效率最高; 随着总需求转矩的增加, 转矩分配系数逐渐增大, 即逐渐由前后电机联合驱动时整车效率最高.
2)在考虑电机空载损耗时, 优化分配结果与不考虑电机空载损耗时的结果对比:在驱动情况下时, 当转速较低、总需求转矩较小时, 此时由于后电机空载损耗功率较低, 所以采用前电机单电机驱动时整车效率较高; 当转速较高、总需求转矩较小时, 此时由于后电机空载损耗功率较高, 所以采用前后电机联合驱动时整车效率较高.在制动情况时, 考虑电机空载损耗和未考虑电机空载损耗的计算结果相同.
利用AMEsim软件[21]建立驾驶员模型、整车动力学模型、电机模型、电池模型和轮胎模型等被控对象模型, 利用Matlab/Simulink软件建立转矩分配策略模块等控制策略模型, 通过look-up模块在线得出转矩分配系数.通过建立仿真接口联合两个软件建立前向仿真平台, 如图6所示.
 | 图6 前后轴独立驱动电动汽车前向仿真平台Fig.6 FRID EV forward simulation platform |
为验证转矩最优分配策略对整车效率的积极意义, 研究过程中使用所建立的前向仿真分析平台, 分别运行NEDC循环测试工况, 考察不同控制方案下的能耗情况.
1)平均转矩分配策略:由前后电机平均提供驱动/制动转矩.
2)未考虑空载损耗的转矩优化分配策略:以未考虑电机损耗为目标函数的分配结果(如图5(b))进行转矩分配.
3)考虑空载损耗的转矩优化分配策略:以考虑电机损耗为目标函数的优化分配结果(如图5(a))进行转矩分配.
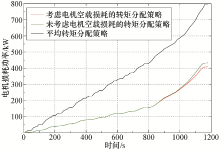
不同转矩分配方案在NEDC循环测试工况下的能量消耗量情况汇总在表2中; 图7是NEDC循环测试工况下, 不同控制方案的整车能量消耗对比.
| 表2 不同转矩控制策略的能耗对比 Tab.2 Comparison of energy consumption under different torque control strategies kJ |
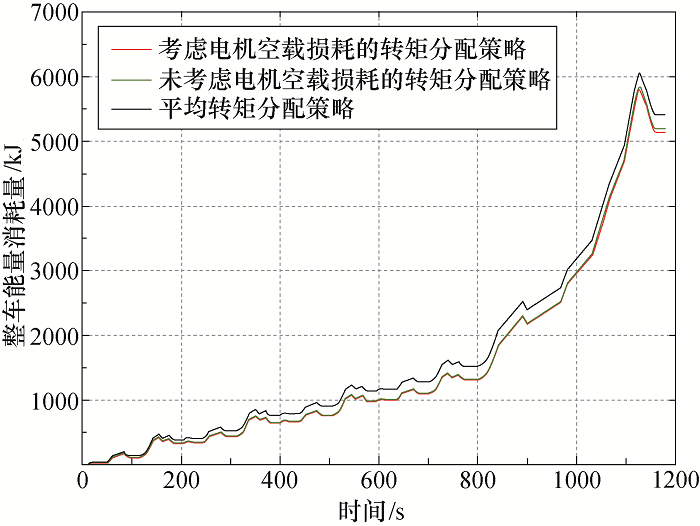 | 图7 NEDC循环下不同转矩分配策略下整车能耗对比Fig.7 Comparisons of energy consumption under different torque distribution strategies under NEDC cycle |
从表2可以看出, 采用优化分配策略相比于采用平均转矩分配策略均能节省整车能量消耗, 节省驱动能量消耗, 增加制动回收能量.未考虑电机空载损耗的转矩优化分配策略相比于采用平均转矩分配策略节能4.03%, 而考虑电机空载损耗的转矩优化分配策略相比于采用平均转矩分配策略节能5.02%.考虑空载损耗的转矩优化分配策略相比于未考虑空载损耗的转矩优化分配策略的能量节省主要体现在驱动能量消耗上, 此结果与1.5节中转矩分配系数计算结果特点较为符合.
1)前电机效率分析.
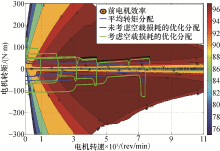
为进一步探讨转矩优化分配策略的节能机理, 将前电机作为主驱动电机, 对3种转矩分配策略下的前电机效率进行了分析, 各个测试工况下的工况点分布情况如图8所示.同时, 由于前电机整个运行区域内效率较高, 所以3种分配方法下, 统计出效率高于94%的工况点所占比例, 可得:平均转矩分配为39.29%, 未考虑和考虑空载损耗的转矩优化分配所占比例分别为60.11%, 59.93%.
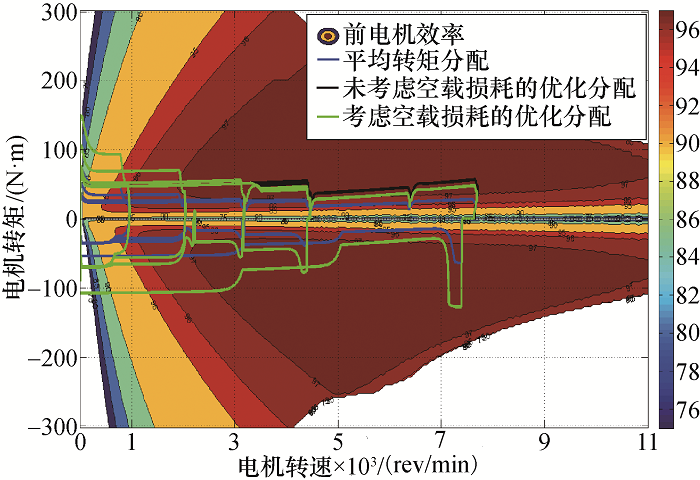 | 图8 不同转矩分配策略下的前电机运行工况点分布Fig.8 Distribution of operating points of front motor under different torque distribution strategies |
观察工况点分布情况可知, 优化分配方法均能使得前电机的运行工况点向高效区间集中, 高效率点所占比例均能提高20%左右.而是否考虑电机空载损耗的转矩优化分配策略对前电机影响较小, 因为前电机始终作为主驱动电机驱动, 所以考虑电机空载损耗和未考虑电机空载损耗的转矩优化分配策略下的前电机高效率点所占比例基本相同.
2)后电机效率分析.
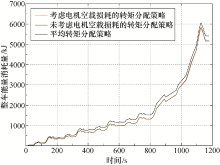
由于后电机并不是在整个驾驶循环中都处于运行状态, 在未运行时还会有空载损耗, 所以对不同转矩分配策略下的后电机损失功率进行对比分析, 如图9所示.同时统计了后电机平均功率损失和后电机运行时间所占比例, 如表3所示.
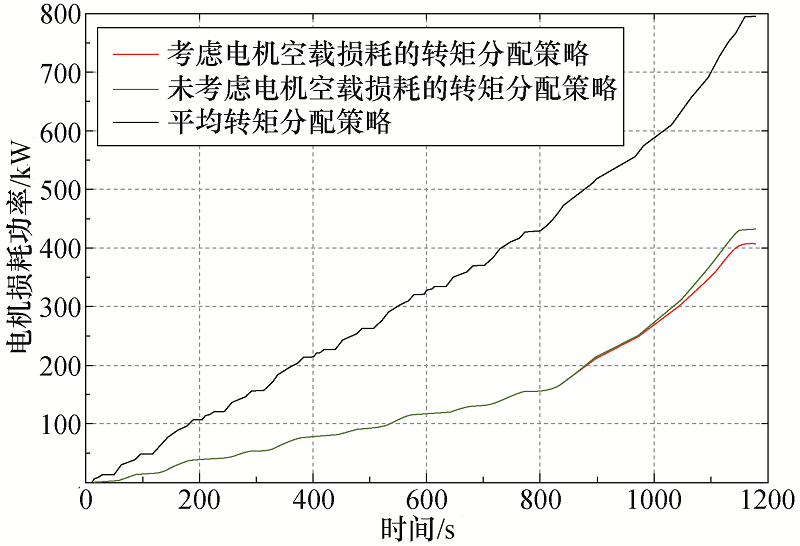 | 图9 不同转矩分配策略下的后电机损耗功率对比Fig.9 Comparisons of rear motor loss power under different torque distribution strategies |
| 表3 不同转矩控制策略的后电机平均功率损失 Tab.3 Proportion of high-efficiency operating points of front motors with different torque control strategies |
采用优化分配策略相对平均分配策略均能够提高后电机的运行效率, 使测试工况下的后电机平均损失功率降低45%左右.由于NEDC循环下的需求转矩较小, 未考虑空载损耗的转矩优化分配策略仅采用前电机驱动, 而考虑空载损耗的转矩优化分配策略由于考虑到后电机在未运行状态下依然有损失功率, 所以在适当时候采用前后电机联合驱动, 以此来避免了后电机的控制功率损失.
综上所述, 采用考虑电机空载损耗的转矩优化分配策略相比于传统未考虑电机空载损耗的转矩优化分配策略能够进一步降低整车能量消耗, 虽然在前电机的高效率点所占比例上有一些降低, 但是这是因为考虑到后电机需要在适当时候启动以避免空载损失功率过大, 从整车能耗来看, 同等工况下节能约0.99%.
研究了前后轴独立驱动电动汽车通过前后轴电机的转矩的合理分配达到改善系统最佳运行经济性的问题.主要得到以下结论:
1)提出了一种基于电机损失功率的转矩优化分配方法, 考虑到电机的空载损失功率, 以此为依据建立了目标函数, 并求解在整个工况范围内的最优控制解.
2)基于电机损失功率的转矩优化分配方法相比于传统未考虑电机空载损耗功率的转矩分配方法, 在整车能量消耗量上减少了0.99%.说明本文提出的转矩优化分配策略有进一步节能的空间.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|