连续体并联抓取机器人的结构设计及运动学分析
 , 林华杰
, 林华杰 Structural design and kinematics analysis of the continuum parallel grasping manipulator
FANG Yuefa, LIN Huajie
, LIN Huajie 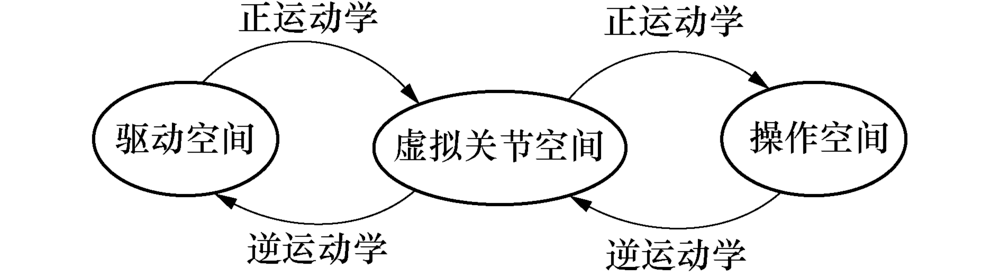
连续体并联抓取机器人的结构设计及运动学分析 |
|
方跃法, 林华杰 |
Structural design and kinematics analysis of the continuum parallel grasping manipulator |
|
FANG Yuefa
, LIN Huajie |
| 连续体并联机器人的运动学空间关系 |
| |