
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
车联网环境下的动态异质交通流车队离散模型
[姚志洪a, b  , 蒋阳升
, 蒋阳升a, b , 王逸a, b , 陈彦如c ]
, 蒋阳升]
|
|


第一作者:姚志洪(1991—),男,安徽安庆人,博士生.研究方向为智能交通控制.email:zhyao@my.swjtu.edu.cn.
传统的异质交通流车队离散模型参数估计基于历史数据,不能很好地反映交通流的动态变化特征.为解决这一问题,构建车联网环境下的动态异质交通流车队离散模型.首先,考虑到车联网环境下,车辆行程时间数据易于获得,可对模型的分布参数进行动态估计;然后,基于动态分布参数,构建动态异质交通流车队模型;最后,通过实测数据分析下游交叉口到达流量分布与上游交叉口离去流量分布之间的关系.结果表明:与经典的Robertson车队离散模型相比,动态异质交通流车队离散模型对下游交叉口的到达车辆流量分布预测效果更好,平均预测均方根误差可减少26.51%.
The discrete model parameters of the traditional heterogeneous platoon are based on historical data, which cannot achieve a good reflection for the dynamic characteristics of traffic flow. To solve this problem, a discrete model of dynamic heterogeneous traffic flow platoon in the Internet of Vehicles is proposed. First, considering the influence of Internet of Vehicles, the travel time of the vehicles can be easily obtained, and the distribution parameters of the model can be estimated in real time based on this. Then, a discrete model of dynamic heterogeneous traffic flow platoon is proposed. Finally, the relation between arrival traffic flow distribution at downstream intersection and departure traffic flow distribution at upstream intersection is analyzed by field collected data. Compared with Robertson’s model, the results show that the proposed model has better prediction performance, and the root mean square error is reduced by 26.51%.
信号交叉口作为城市道路交通系统的重要组成部分之一, 其运行效率直接影响城市道路交通系统的运行效果[1, 2].在城市道路上, 由于信号交叉口的存在, 连续的交通流被分割成离散的车队; 且由于车队中车辆性能和驾驶员驾驶习惯的不同, 车队在向下游交叉口行驶的过程中被逐渐离散化, 出现所谓的“ 车队离散” 现象[3].车队离散是信号协调控制中考虑的重要因素之一, 通过分析上游交叉口车队离去与下游交叉口车队到达之间的规律, 对干道信号协调方案进行优化[4, 5].
车队离散模型作为信号协调控制优化的理论基础之一, 一直是研究的热点问题.Pacey[6]在分析路段车辆速度分布的基础上, 提出了基于车辆速度服从正态分布的车队密度离散模型; Grace[7]提出应考虑车队密度的变化, 在Pacey模型的基础上提出了描述车队密度变化的离散模型.但在信号协调控制中, 不仅需要掌握车队的密度特征, 更需要预测车队流量的变化.因此, Robertson[8]在分析Hillier等[9]收集的车队数据的基础上, 提出了一种采用循环迭代计算的车队流量离散模型, 该模型假设车辆在路段的行程时间服从移位几何分布[10].由于该模型采用迭代计算、具有速度快的优点, 被广泛地应用于TRANSYT[9]、SCOOT[11]、SATURN[12]和TRAFLO[13]等信号配时优化软件或控制系统中.但是, Tracz[14]和Polus[15]通过收集不同交通环境条件下的车辆行程时间数据, 发现其并不都是服从移位几何分布, 用正态分布或者对数正态分布拟合效果更好.随后的大多数研究主要集中在Robertson模型的参数校正[16, 17, 18], 并未提出新的模型.为增强模型的描述能力, 姚志洪等[19, 20, 21]分别考虑行程速度的有界性和交通流的异质性, 提出了基于截断分布和混合分布的车队流量离散模型.
从以上分析可知, 现有车队离散模型的研究可以总结为:假设车辆在路段行程时间或行程车速服从某种特定的概率密度分布, 基于此推导对应的车队离散模型.但是, 概率密度函数中的相关参数估计均基于历史的调查数据, 不能反映实时的交通流变化特征; 且需要获得路段每辆车的行程时间或行程速度数据, 数据收集难度较大且费用较高.随着车路协同和车联网技术的发展, 为信号控制领域带来了新的机遇和挑战[22, 23, 24, 25, 26].与传统固定检测器相比, 车联网环境能够提供海量、连续、关联的车辆移动轨迹数据.针对这些数据, 可以有两个方面的应用:其一是可以在此基础上开发新的模型和算法, 其二是改进传统模型算法的性能.本文采用第二种研究思路, 即根据车联网环境提供的数据, 改进传统车队离散模型的预测效果, 在此基础上提出新的动态车队离散模型.同时, 随着两个方面的应用, 车联网技术也将对信号控制领域产生了新的冲击, 且目前的发展趋势可分为两种态势:一是在旧有的信号控制系统(即TRANSYT、SCOOT、SATURN和TRAFLO)中, 加入车联网环境提供的相关数据环境, 进一步提升系统的控制性能和效果; 二是直接抛弃旧的系统, 开发出颠覆式的车联网环境下新的信号控制系统.但就目前的发展趋势来说, 大多城市都已经拥有自己的信号控制系统, 在现有系统上加入车联网环境提供的相关数据, 是提高信号控制系统效率的最直接、有效的途径之一.因此, 研究车联网环境条件下的动态车队离散模型具有较大的意义.
综上可知, 车联网环境将给数据采集和处理带来极大的冲击, 如与传统的固定检测器相比, 车联网环境下车辆的行程速度信息很容易获取[24, 25, 26].因此, 可以基于实时获取每辆车的行程速度数据, 动态校正分布函数的相关参数, 使其能够更好地反映交通流的运行特征.本文作者以截断混合正态分布描述路段异质交通流的行程速度特征, 基于此构建车联网环境下的动态异质交通流车队离散模型, 基本思路为:采用车联网环境下提供的实时车辆行程速度数据, 对截断混合正态分布中的参数进行实时动态估计; 基于实时估计的参数, 构建动态车队流量离散模型.
若一个随机变量
式中,
若
考虑到异质交通流条件下不同交通流特征的差异性, 道路车辆的行程车速呈现混合分布特征[2].例如, 大多城市早晚高峰道路上的车辆主要由公交车和小汽车组成, 由于两种车辆的性能差别较大, 且公交车辆需要在公交车站停靠等, 导致了公交车辆的路段行程速度与小汽车的情况差别较大, 道路车辆的行程车速分布呈现双峰型特征[2].现有研究表明[27], 路段车速可以由正态分布或它的混合分布拟合.因此, 可假设异质交通流条件下的车辆行程车速服从截断混合正态分布.若行程车速用随机变量
式中:
式(2)中的分布参数可由实际调查数据结合EM算[28]迭代估计得出, 而在车联网环境下, 可通过实时收集到的路段行程车速对分布参数进行实时
动态的估计和校正.下面将具体探讨如何利用调查数据模拟车联网环境, 对分布参数进行估计, 并进一步阐述车联网环境下采用动态参数的必要性.
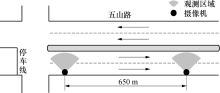
为证明行程车速分布假设的合理性和采用动态参数的必要性, 选取广州市五山路作为调查对象, 其情况如图1所示.该路段由双向4车道组成, 早晚高峰的公交车流较大, 包含了14条公交线路, 整个路段早晚高峰交通流呈现异质交通流特征.其中, 调查时间为上午7:30— 11:20.
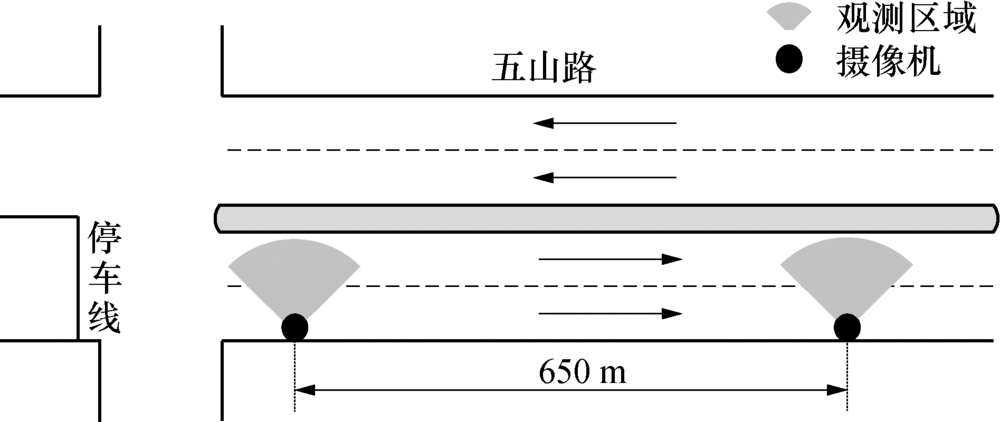 | 图1 调查路段的情况Fig.1 Surveyed road section |
如图1所示, 在该调查路段上游交叉口的出口道处和下游断面(距离650 m)分别架设摄像机, 采集车辆的车牌号和经过断面的时间点等相关数据.经过牌照比对, 获得有效车辆行程速度数据2 144辆, 其中包含公交车辆260辆、小汽车1 844辆.为便于数据处理和展示, 将调查时段分为4个时段, 分别为7:30— 8:20、8:20— 9:30、9:30— 10:20和10:20— 11:20, 各个时段的行程车速特征数据见表1.
| 表1 行程车速数据 Tab.1 Travel speed data |
从表1 中可知, 4个时段的相关参数有一定的差异性, 即说明了不同时段的车流具有不同的特征, 实际应用时应实时收集数据动态校正模型的分布参数.由于传统检测设施不能直接获取每辆车的行程车速数据, 所以难以实现动态校正模型分布参数的目标.考虑到车联网环境下单个车辆的行程速度数据很容易获取, 这为模型动态参数的估计提供了数据获取渠道, 后面将具体分析不同时段区间粒度采用动态分布参数的可行性.
根据调查数据, 可以将数据分为不同时间区间粒度, 即多长时间区间对分布参数校正一次.这里分为5个时间区间粒度来讨论, 具体为120、60、30、20和10 min.分别采用截断混合正态分布来拟合不同时间区间粒度的行程时间数据, 采用拟合优度决定系数
| 表2 分布拟合评价 Tab.2 Evaluation of different distribution fitting |
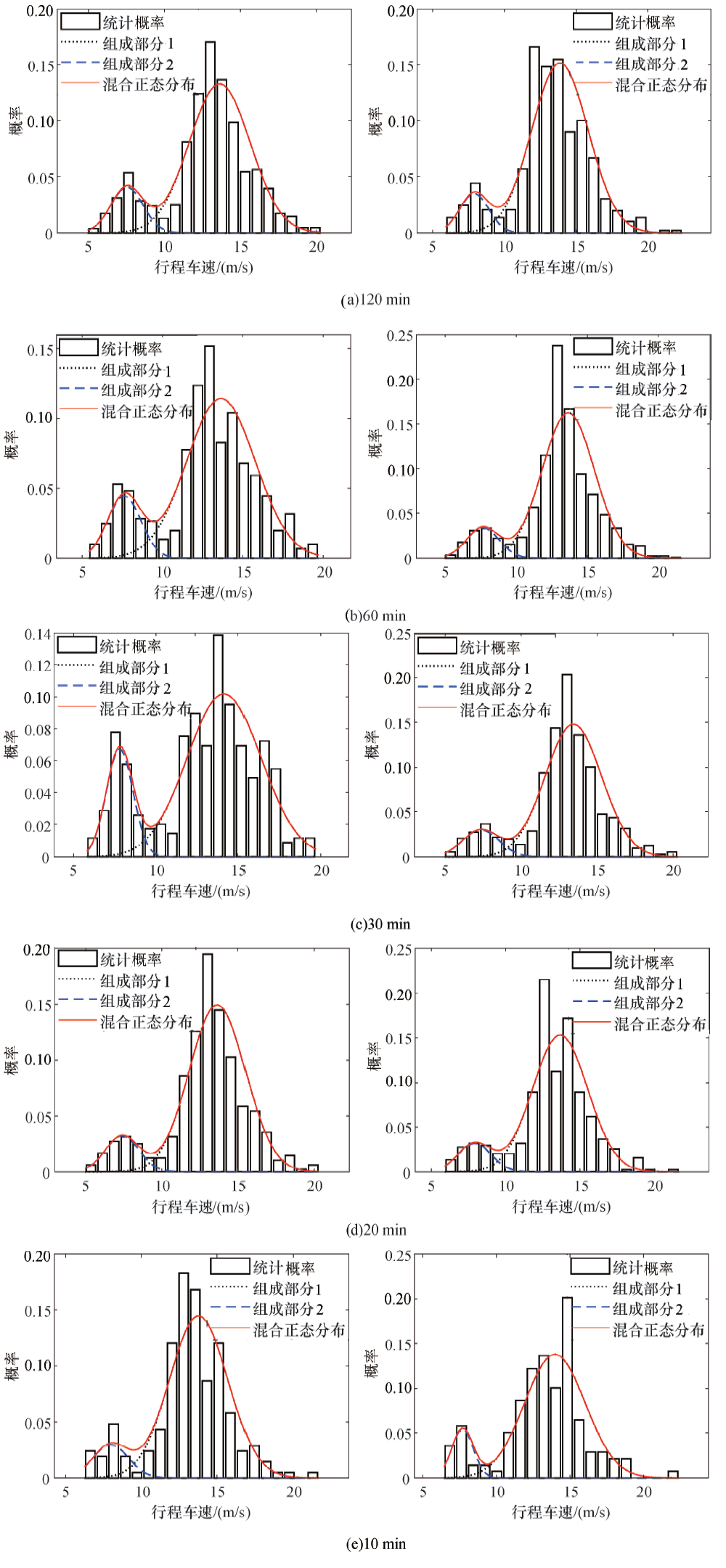 | 图2 分布拟合Fig.2 Distribution fitting |
从图2和表2中可知, 该截断混合正态分布由两个正态分布组成:其中, 组成部分1行程速度的平均值和标准差均较高, 体现了路段小汽车的行程车速分布特征; 相反, 组成部分2行程速度的平均值和标准差较低, 为公交车速的分布规律.同时, 比例参数则体现了两种车辆在交通流中所占的比例.因此, 该截断混合正态分布能够体现异质交通流条件下车辆行程车速的分布特征.
同时, 从图2和表2的决定系数R2 可知, 截断混合正态分布在不同时间区间粒度上的拟合效果均表现良好, 决定系数R2值均在0.97以上.这说明, 采用动态参数不影响分布模型拟合效果的稳定性, 即说明了可以在更小的时间区间粒度下估计混合分布的相关参数的可行性, 并据此推导动态车队离散模型.下面将具体分析不同时间区间粒度条件下截断混合正态分布相关参数的差别, 进一步说明采用动态参数的必要性.
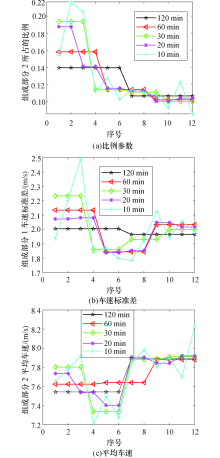
为证明模型采用动态参数的必要性和合理性, 根据上面对时间区间的分类, 对比分析了3个截断混合高斯分布的模型参数, 分别为组成部分2的所占比例、组成部分1的行程车速标准差和组成部分2的平均行程车速, 具体如图3所示.
 | 图3 动态参数比较Fig.3 Comparison of dynamic parameters |
从图3可知, 3个参数在不同的时间区间粒度下波动均较大, 即采用统一的参数不能实时反映交通流的动态特征, 仅能反映交通流的整个时间区间的平均特征.考虑在车联网环境下获取车辆行程车速的便利性, 为动态车队离散模型提供了数据基础; 即可以通过实时采集的路段车辆行程车速, 动态估计模型中的分布参数.基于此, 动态车队离散模型将更能反映路段交通流的离散特征.下面将具体基于动态参数推导动态车队离散模型.
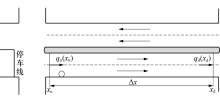
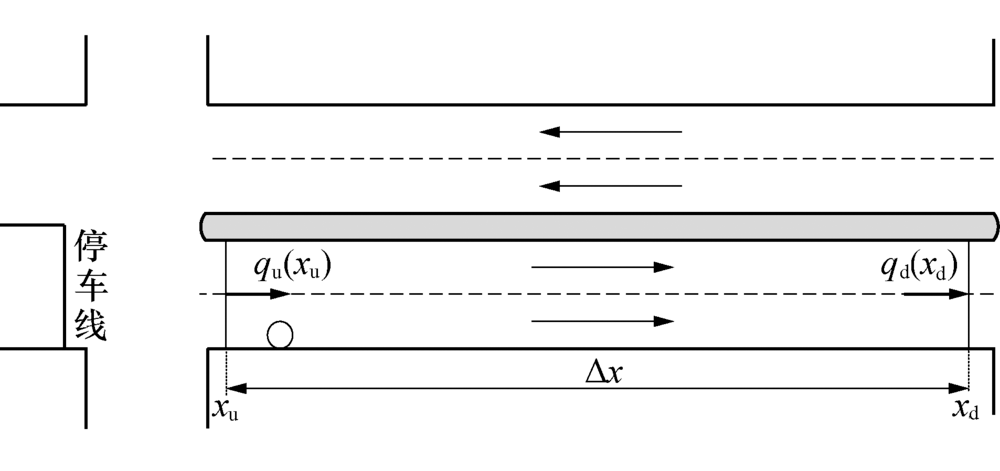
如图4所示, 假设上游交叉口
 | 图4 车队离散模型Fig.4 Platoon discrete model |
与静态模型不同, 由于车联网环境下可以动态估计路段行程车速的分布参数, 因此上游不同时刻离去流量所对应的分布参数不同.假设上游
式中:
由于车联网环境下可以实时收集车辆通过路段的行程车速, 同时行程车速为事后信息(即只有车辆通过路段后才能获取), 但考虑到交通流在很短的时间内不会发生突变(即相邻两个较小时段的车流特征相似), 因此采用前一时段的行程车速分布参数来表征当前时段的车流特征.其中, 式(3)中的相关参数可根据收集的行程车速采用EM算法[28]进行估计.同时, 根据文献[2]中的模型, 可得上游
1)若
2)若
式中:
为简化计算, 根据正态分布的性质可知, 一般正态分布均可转化为标准的正态分布, 有
式中:
因此, 可将式(6)代入式(4)、(5), 得上游
1)若
2)若
同时, 对上游不同时间点到达下游的车流分布按时间轴集计, 可获得下游到达流量的累计分布, 即
本文作者通过具体调查数据, 划分不同的时间区间粒度, 并将上述动态模型与经典的Robertson车队离散模型比较, 证明动态异质交通流车队离散模型的有效性和可靠性.
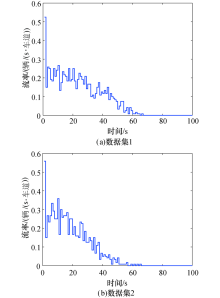
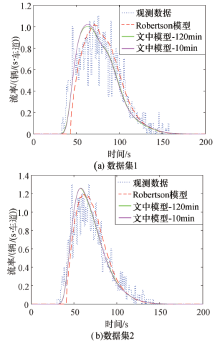
将本文第2节的调查数据, 按照时间区间划分为两个数据集(7:30— 9:30和9:30— 11:20), 按周期统计可获取两个数据集的上游交叉口离去流率分布和下游断面到达流率分布, 如图5和图6所示.
 | 图5 上游交叉口离去流率Fig.5 Diagram of leaving flow rate at upstream intersection |
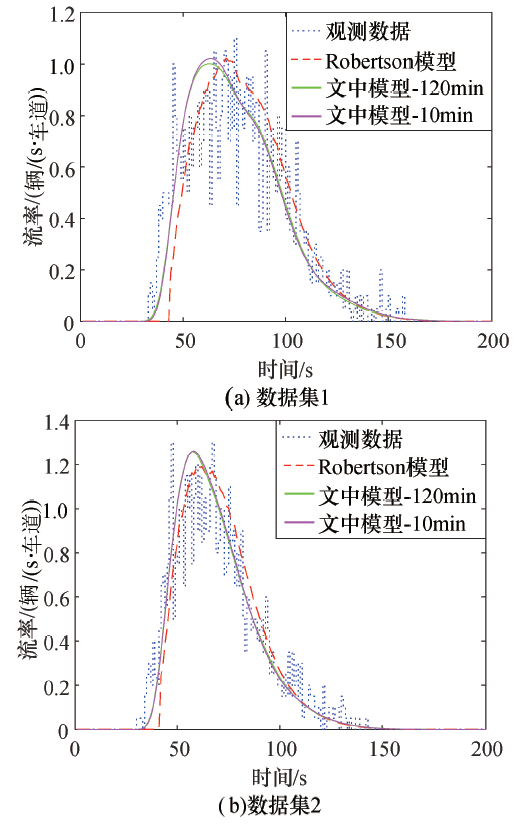 | 图6 下游断面到达流率分布Fig.6 Diagram of arriving flow rate at downstream section |
由图5可知, 2个数据集均呈现典型的交叉口离去流量分布特征:绿灯开始时, 离去流率最大, 为饱和流率值; 随后离去流率逐渐减少到0.由上面分析可知, 在车联网环境下, 很容易获取车辆在路段的行程速度信息, 基于此可对路段行程车速分布的参数进行动态估计.因此, 可根据上游交叉口离去流率分布和第3节中的模型, 计算获得下游断面的到达流率分布.为证明动态参数的有效性, 本案例中的参数估计时间区间粒度与本文第2节数据拟合的时间区间粒度一致, 即分为5个时段:120、60、30、20和10 min.基于此, 分别采用上述动态异质交通流车队离散模型和Robertson模型, 预测下游断面到达流率的分布情况.其中, Robertson模型中的相关参数可由文献[16]中的方法估计获得.为避免图线过多, 图6中仅绘制了实际到达流率曲线、Robertson模型预测曲线和文中模型2种时间区间粒度的预测到达流率分布曲线.
由图6可知, 与Robertson模型相比, 文中模型在预测下游断面车流到达时刻点和整体分布曲线上都表现更优, 说明文中模型的有效性和可靠性.下面将计算具体评价指标, 以评价Robertson模型和文中模型不同时间区间粒度条件下的预测效果.
为定量地描述动态车队离散模型不同时间区间粒度的预测效果, 分别计算Robertson模型和文中模型5种时间区间粒度模型预测下游断面到达流率与实际观测到达流率的均方根误差值, 计算结果如表3所示.
| 表3 均方根误差对比 Tab.3 Comparison of root mean square error |
从表3可知, 5个时间区间粒度模型预测均方根误差均在1.82左右, 比Robertson模型的预测误差要小, 预测精度提升了26.51%.同时, 比较不同时间区间粒度模型预测误差可知, 时间区间粒度越小, 模型预测的均方根误差也越小.因此, 文中模型的参数具有很强的时效性, 时间区间粒度越小, 越能体现交通流的车队离散特征, 同时也说明文中建模思路的正确性和合理性.但从表3中可以看出, 上面探讨的最小时间区间粒度为10 min, 但从结论可知, 当时间粒度内的数据满足统计规律且越小时, 模型预测误差也将越小, 因此未来可研究更小的时间粒度(如5或1 min等)模型的预测效果; 且不同时间粒度对结果的影响很小, 未来也可在数据集充分的情况下, 研究是否可以在一定的时间区间粒度范围内, 得出时间粒度将不影响预测结果的结论.
文中以异质交通流为研究对象, 构建了基于车联网环境下的动态异质交通流车队离散模型.通过实际调查数据对模型进行了比较分析, 得出了以下结论:
1)截断混合正态分布能够很好地拟合异质交通流条件下的车辆行程车速分布, 拟合决定系数均在0.97以上;
2)截断混合正态分布能够对不同时间区间粒度的车辆行程车速进行拟合, 从而证明了动态参数的可行性;
3)与Robertson模型相比, 动态车队离散模型平均预测误差减少了26.51%;
4)对比不同时间区间粒度的模型预测效果, 表明时间区间粒度越小, 模型预测误差越小, 进一步证明了动态异质交通流车队离散模型的合理性和优越性.
未来可在采用车联网技术获取海量数据的基础上, 研究探讨其他因素(公交比例、天气等)对模型预测结果的影响; 同时, 也可研究更小时间区间粒度下模型的预测效果, 探讨其他形式的动态车队离散模型的参数估计和建模方法.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|