
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
驾驶员视角和后视效应对交通流稳定性的影响分析
[侯培国 , 洪嘉阳, 余焊威, 严晨]
, 洪嘉阳, 余焊威, 严晨]
, 洪嘉阳, 余焊威, 严晨]
|
|


第一作者:侯培国(1968—),男,山东郯城人,教授,博士,博士生导师.研究方向为智能仪器.email:pghou@ysu.edu.cn.
交通流跟驰模型是微观交通流仿真和交通安全评估的重要工具,在城市交通规划、交通运行宏观调控等方面广泛运用.传统交通流跟驰模型主要考虑车辆参数,对于驾驶员因素不够重视,本文将驾驶员视角引入全速度差(FVD)模型,研究基于FVD模型的扩展模型,结合驾驶员后视效应,利用线性稳定性分析扩展模型的交通流稳定性特点.通过将驾驶员视角用驾驶车辆体型参数进行数据量化,分析车辆体型参数对交通流稳定性的影响.仿真实验表明:本文研究的扩展模型在车距较小的情况下交通流稳定性要优于FVD模型;驾驶员对视角变化的敏感系数越高,整个交通流越稳定;驾驶员后视概率越高,交通流越稳定;对于大型车辆,车流高峰时期为其开辟专用车道能够提高该阶段交通流稳定性.
Traffic flow following model is an important tool for microscopic traffic flow simulation and traffic safety assessment. It is widely used in urban traffic planning, traffic operation and macro regulation. The traditional car following model of traffic flow considering the main parameters of a vehicle, the driver factors not enough attention, this paper introduces the driver from the perspective of Full Velocity Difference (FVD) model of extended model based on FVD model, combined with the driver’s visual effect, the stability of traffic flow characteristics of extended model of linear stability analysis. The influence of vehicle shape parameters on the stability of traffic flow is analyzed by quantizing the driver’s angle of view with the body parameters of the driving vehicle. The simulation results show that the extended model in the case of smaller car traffic flow stability is better than the FVD model; the coefficient of sensitivity to the changes of view driver is high, the traffic flow is more stable; the higher the probability of driver’s visual, traffic flow is more stable; for large vehicles, traffic during the peak period for its development lane can improve the phase stability of traffic flow.
近年来, 交通阻塞问题日益严重, 为了改善交通问题, 国内外学者对其物理现象进行了一系列的研究[1, 2, 3, 4].交通阻塞是交通流不稳定的一种表现, 基于交通流的特性, 人们通过研究已经开发了各种交通模型, 如汽车跟驰模型[5], 细胞自动机模型[6], 延误影响模型[7]和气动力学模型[8].1995年, 文献[9]提出了优化速度(OV)模型, 该模型虽然可以描述交通拥堵的变化过程, 但是与实测数据相比, OV模型中往往会出现不切实际的高加速度与高减速度.为了改善这个问题, 文献[10]提出了一种广义力模型, 速度差被加入模型中, 有效改善了OV模型中出现的问题, 但上述两个模型仍无法解决的问题是:当前车车速大于后车, 那么即使两车的车距小于安全车距, 后车依旧不会减速.文献[11]提出了FVD模型, 该模型同时考虑车距、速度差以及本车的车速, 能比较实际地解释交通阻塞、疏导、幽灵塞车、时走时停等现象.以FVD为基础, 文献[12]利用非线性分析在中性稳定曲线附近得到描述车头间距的mKdV方程, 利用方程的扭结-反扭结波解描述了交通流堵塞现象.文献[13]对FVD模型进行了优化, 提出全速度和加速度差模型, 扩大了交通流的稳定区间.
综上所述, 目前对交通流的研究中考虑更多的是相邻两车之间的相对位移、相对速度等, 没有考虑驾驶员的视觉角度, 一些学者对此也提出一些改进:文献[14]考虑后视效应和前车的速度差信息对交通流稳定性的影响, 提出了一个后向观测的扩展跟驰模型.文献[15]提出了一种将视角作为参考量的车辆跟随理论模型, 发现前车的宽度对交通流的稳定性有很大的影响.文献[16]通过捕获后车和前车之间的驾驶员视角以及在没有车道规划的道路上的变化率来估计车辆当前状态的安全性.本文作者在前人研究的基础上, 考虑后车驾驶员视角和后视效应对交通流稳定性的影响, 提出基于FVD模型的扩展模型, 通过线性分析得到稳定性条件, 通过仿真分析各个变量对于稳定性的影响.
FVD模型的控制方程为[11]
式中:Δ xn
文献[14]基于FVD 模型, 提出了考虑后视效应的扩展模型, 模型控制方程为
p(-VB
式中:p为驾驶员关注后车车距信息的概率; VF
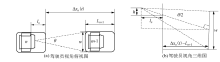
在现实中, 驾驶员视角也是影响交通流稳定性的一个重要因素, 其受到车间距、车头长度、驾驶员眼睛与车头平面垂直高度等诸多因素的影响[17], 图1为驾驶员视角与上述因素之间联系的示意图.
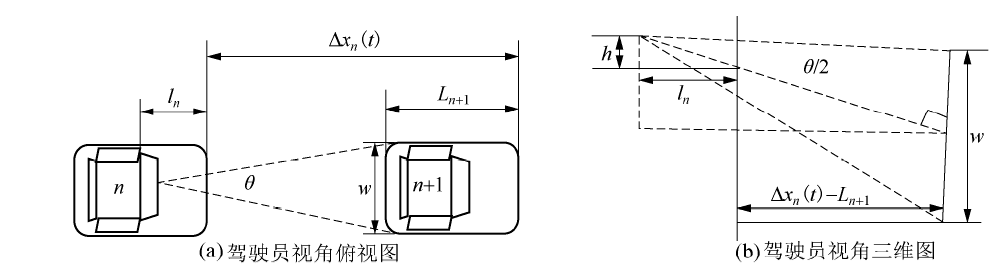 | 图1 驾驶员视角示意图Fig.1 Schematic diagram of driver’ s visual angle |
图1中, h表示驾驶员眼睛与车头平面的垂直高度, 亦可以表示驾驶员座位的高度; ln为第n辆车车头长度, 即相邻两辆车后车的车头长度; w为第n+1辆车的宽度, 即相邻两辆车前车的车尾宽度; Ln+1为第n+1辆车车身长度, 即相邻两辆车前车的车身长度; θ 为驾驶员观察前车时的视线角度.
由图1推导出第n辆车驾驶员的视角θ n
考虑到驾驶员视角信息的影响, 引入视觉角度和视角变化率替代式(2)中的车头间距和相对速度, 结合式(3)该扩展模型演变为考虑后视效应和驾驶员视角变化率的交通流跟驰模型, 控制方程如下
式中:px为后视效应中驾驶员观察后车车距信息概率, 由于在现实驾驶环境中, 驾驶员观察前车的概率一般比后车的高, 因此0≤ px< 1/2, λ 为驾驶员对视角变化率的敏感系数.
假设初始状态交通流处于稳定状态, 各车的车头间距均为b, 速度为V(θ 0), 此时的驾驶员初始视角θ 0=2arctan
车辆受到干扰后, 位置变为
由式(6)可得
将式(6)~式(9)代入式(4)进行一阶泰勒展开得
其中, An=
则式(11)可化为
令z=α +jβ , 由欧拉公式可知, ejk=cos k+jsin k, 代入式(10)简化可得
令α 及虚部系数为0, 得
又令实部为0, 得
将式(16)代入式(17) , 得
令k→ 0, 得
由此得扩展模型交通流中性稳定性曲线方程为
对比扩展模型与FVD模型的优劣, 分析驾驶员对邻车信息的关注度px、视角变化率的敏感度λ 对交通流稳定性的影响.
1)当A=1, px=0 同时不考虑驾驶员视角信息, 式(17)简化为
此时, 扩展模型退化为FVD模型, 与式(20)相比,
2)当A=1, λ =0, px≠ 0时, 此时只考虑驾驶员后视效应, 式(20)简化为
对式(22)中px求偏导
其中, 0< px< 1/2, 则2px-1< 0, 由于V'(θ 0)< 0, 得
3)对于视角变化率敏感系数, 由式(20)看出, 随着λ 增加, 交通流稳定所需的驾驶员敏感系数a不断减小, 说明驾驶员敏感系数增大, 扩展模型的交通流稳定性提高.
综上, 扩展模型的交通流稳定性优于FVD模型, 同时驾驶员对于后车车距信息的关注度和视角变化率敏感系数的增加能提高扩展模型的交通流稳定性.
本节首先通过仿真得到中性稳定性分析对比扩展模型和FVD模型, 其次对后视效应及驾驶员视角信息对交通流稳定性的影响进行仿真分析, 最后对驾驶员视线高度h、车头长度ln、前车宽度w对交通流的影响也进行仿真分析.
速度优化函数[10]为
式中:V1=6.75 m/s; V2=7.91 m/s; C1=0.13 m-1; C2=1.57 m-1; L为车身长度, 取4 m.
由式(3)和式(24)得出考虑驾驶员视角的优化速度函数为
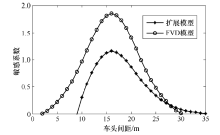
图2为扩展模型与FVD模型中性稳定曲线对比图, w=1.8, h=0.5, ln=1, Ln+1=4, λ =10, px=0.1, 其中曲线上方为稳定区间, 下方为非稳定区间, 由图2可知, 在车距比较小的时候, 扩展模型对驾驶员距离敏感系数a的要求比较低, 交通流扩展模型交通流稳定性超过FVD模型; 而随着车距增大, 扩展模型的稳定性反而不如FVD模型, 其原因为:1) 由于车辆驾驶的主体是驾驶员, 随着车距的增加, 驾驶员对于车距的关注度会明显降低, 此时驾驶员的敏感系数也会随之降低.2) 随着前车越来越远, 驾驶员视角随着车距变化的变化率也会越来越低, 则此时驾驶员对于视角变化的敏感系数也会降低, 根据上文分析, 驾驶员视角变化的敏感系数降低, 交通流稳定性降低(该结论下文会给出实验证明).因此当车距较大时考虑驾驶员因素反而会减小交通流稳定性区间, 而FVD模型并不考虑驾驶员因素, 所以在车距较大的情况下本文研究的扩展模型交通流稳定性不如FVD模型, 但是车距比较大时驾驶员对前车车距关注度下降并不会影响驾驶安全, 且驾驶员在前方道路较为空旷时会不自觉增加车速, 两车之间车距会快速拉近, 因此在这个意义上, 扩展模型的交通流稳定性仍然比FVD模型高.
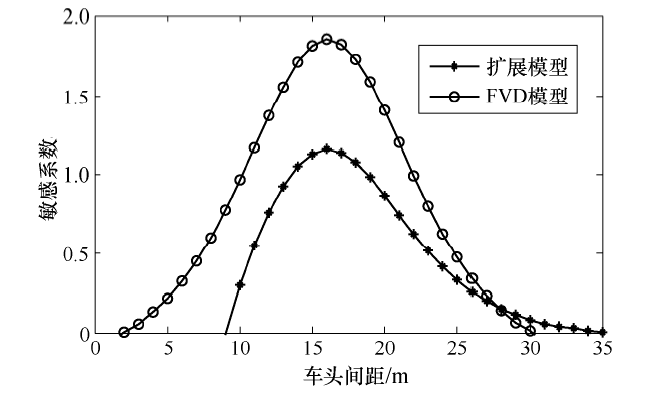 | 图2 扩展模型与FVD模型中性稳定曲线对比Fig. 2 Comparison of the neutral stability curves between the extended model and the FVD model |
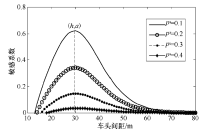
图3为其他参数不变的条件下, 不同px值下车头间距与敏感系数a的中性稳定性曲线, 曲线顶点(h, a)为交通流稳定的临界点.从图3可知, 随着驾驶员对后车关注度增加, 交通流的稳定区间在增大, 说明驾驶员对后车关注度能够增加交通流的稳定性.
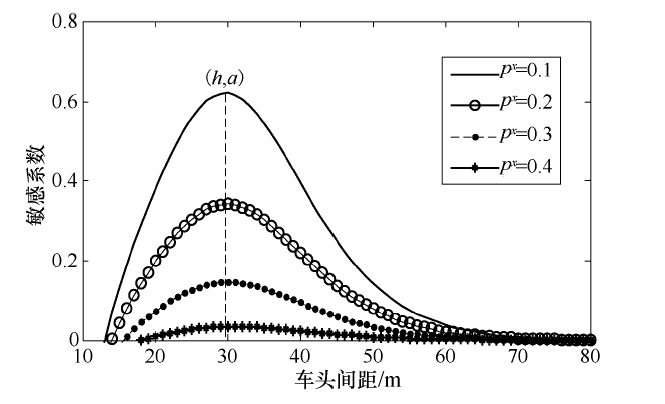 | 图3 不同px值下的车头间距与敏感系数的中性稳定性曲线Fig. 3 Neutral stability curves of headway and sensitivity coefficient under different px |
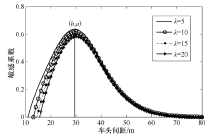
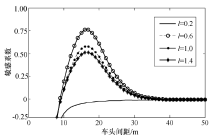
图4为其他参数不变的条件下, 不同λ 值下车头间距与a的中性稳定性曲线.从图4可知, 在车距小于临界点车距h的情况下, 驾驶员对视角变化率的敏感度越高, 对保持交通流稳定的作用越大, 而随着车距超过临界点, 该作用逐渐弱化, 这是因为随着车距增加, 驾驶员的视角不断减小, 同时驾驶员视角随着车距变化的幅度也在不断减小, 故驾驶员对车距变化的敏感度不断下降, 因此在较大的车距下, 驾驶员视角变化的敏感系数对交通流稳定性的影响比较小.
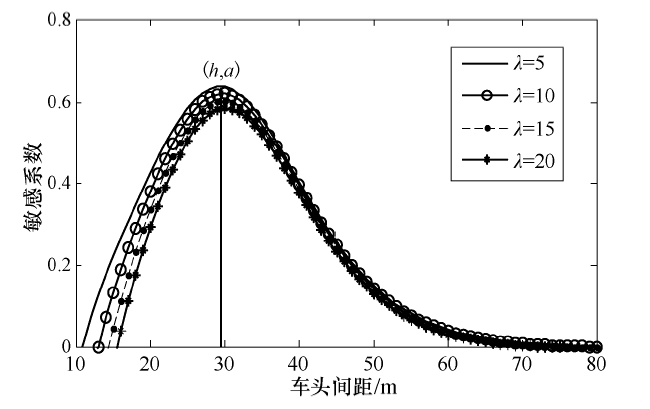 | 图4 不同λ 值下的车头间距与敏感系数的中性稳定性曲线Fig.4 Neutral stability curves of headway and sensitivity coefficient under different λ |
车辆参数与图3和图4相同, 在临界点(h, a)处对px和λ 进行综合考虑, 由图5可知随着驾驶员对后车车距关注度px以及对视角变化的敏感度λ 的增加, 临界点所需的a不断降低, 临界点a降低, 则交通流稳定区间增大, 交通流稳定性增加, 因此px和λ 的综合影响能提高交通流稳定性.
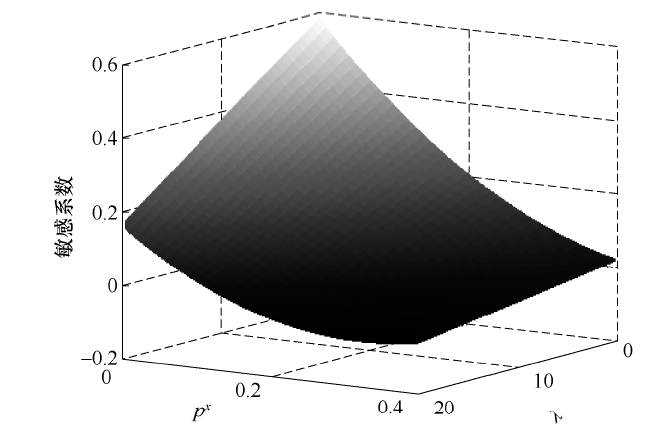 | 图5 px和λ 对交通流稳定性的综合影响Fig.5 Comprehensive influence of px and λ on traffic flow stability |
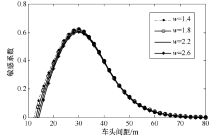
图6为前车宽度w与车距敏感系数a的中性稳定曲线, 由图6可知, 若领头车辆为宽度较大的大型车辆(如卡车或者重型货车), 那么交通流能变得更加稳定, 文献[15]认为下列两个原因也许能解释这个现象:1)当前方行驶车辆为卡车或者载重货车这类相对来说比较危险的车辆时, 驾驶员会提高自身的驾驶专注度, 从而使交通流更加稳定; 2)前车为大型车辆时, 后车驾驶员的视角变化率较高, 从而使驾驶员对视角变化率的敏感系数λ 更高, 提高了交通流的稳定性.
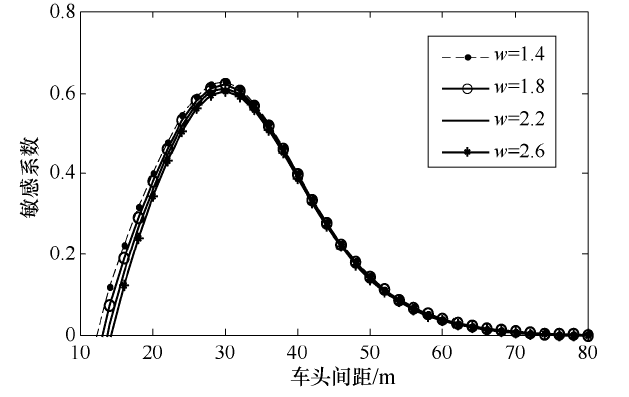 | 图6 前车宽度与车距敏感系数的中性稳定曲线Fig.6 Relationship between the width of the front car and the sensitivity coefficient |
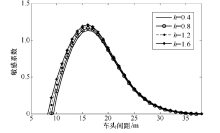
图7为车头长度h与车距敏感系数的中性稳定曲线, 从图7可知随着车头长度的增加, 交通流稳定性开始逐渐提高, 而后又逐渐下降, 文献[18]认为, 车头长度较短或者较长的往往是体型较大的客车或者载重货车, 这类车辆由于比较笨重往往容易导致交通阻塞, 降低交通流的稳定性.
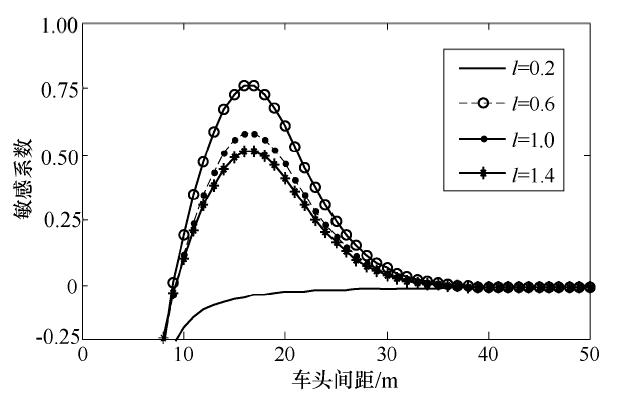 | 图7 车头长度与车距敏感系数的中性稳定曲线Fig.7 Relationship between the length of car and the sensitivity coefficient |
因此, 由图6和图7可知, 对于大型客车或者载重货车, 一方面可以提高驾驶员的专注度和灵敏度, 从而提高交通流的稳定性, 另一方面又因为这类车辆笨重的车型容易导致交通阻塞从而降低交通流的稳定性, 因此, 对于这类车辆, 本文认为较好的措施是开辟大型车辆的专用车道, 一方面能提高该专用车道上驾驶员的驾驶专注度, 另一方面能避免大型车辆对于整个交通的负面影响.
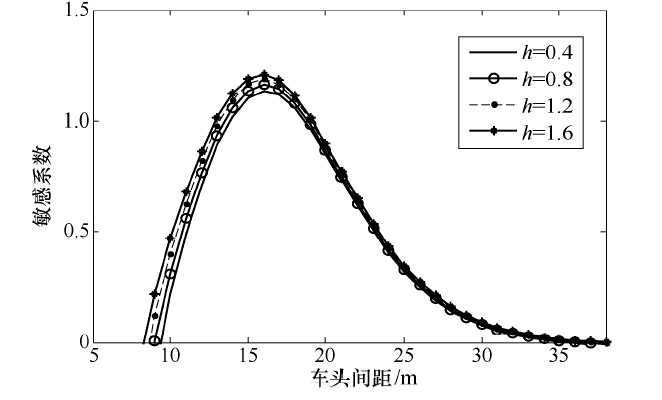 | 图8 驾驶员视线高度与车距敏感系数的中性稳定曲线Fig.8 Relationship between driver sight height and the sensitivity coefficient |
图8为驾驶员视线高度h与车距敏感系数a的中性稳定曲线, 从图中可知, 适当提高驾驶员视线高度能增加交通流的稳定性, 其原因可能是较高的视线高度能使得驾驶员视线更加开阔, 从而使车辆行驶更加安全, 这给汽车制造商和驾驶员都有一个较好的提示:对于制造商来说, 设计汽车时, 在不影响驾驶舒适性和安全性的前提下, 适当提高驾驶员座椅的高度, 能改善交通状况, 减少交通事故的发生; 对于驾驶员来说, 将座位靠背调的太低虽然能获得更好的舒适性, 但会造成视线高度不足而影响交通流稳定性, 因此调靠背时不应调得太低, 应该保持足够的视线高度.
综上所述, 仿真结果与分析结论是一致的, 与实际交通行为也是相符合的, 因此扩展模型具有一定的实际意义和参考价值.
1) 本文作者提出的扩展模型与FVD模型相比, 在车辆间距较小的前提下有效提高了交通流稳定性区间, 增强了交通流运行的稳定性, 同时尽管在车辆较大的情况下交通流稳定性不如FVD模型, 但是本文认为车辆间距较大情况下驾驶员敏感度降低不会影响驾驶安全性, 同时在前方较为空旷的路况下, 后车车速会加快, 拉近与前车车距, 此时扩展模型交通流稳定性又会高于FVD模型.
2) 对于驾驶员后视效应, 驾驶员后视概率增加会扩大交通流稳定区间, 也证明后车信息有助于提高交通流稳定性.
3) 驾驶员视线高度越高, 交通流的稳定性越高, 因此驾驶过程中不要把座椅调的太低.
4) 通过对车辆体型各项参数在交通流稳定性影响的实验说明, 大型车辆对于交通路稳定性的影响有积极作用, 也有消极作用, 因此在车流高峰时期为大型车辆开辟专用车道是一个较好的选择.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|