{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于RT-LAB的PET中间级直流变换器半实物仿真平台设计
[刘京斗1  , 李小均
, 李小均1 , 吴学智2 , 荆龙1 , 王旭亮1 ]
, 李小均|
|


第一作者:刘京斗(1975—),男,河北栾城人,工程师,硕士.研究方向为电力电子及新能源发电技术.email:jdliu@bjtu.edu.cn.
隔离型双向DC/DC变换器是电力电子变压器(PET)的重要组成部分,其性能好坏将显著影响整个PET的功能.大功率隔离型双向DC/DC变换器多采用模块化串并联的方式实现.设计过程中存在控制复杂、研发周期长、测试困难等问题.本文基于RT-LAB搭建了包含模块化隔离型双向DC/DC变换器实际物理装置的半实物仿真平台,利用RT-LAB的控制功能及在线参数调试等特点对系统进行优化设计.实现了输入串联输出并联型DC/DC变换器均压均流控制策略.结果表明:该半实物仿真平台是研究模块化DC/DC变换器系统的有效方法.
Isolated bi-directional DC/DC converter is an important part of power electronic transformers, its performance will significantly affect the function of the entire Power Electronic Transformers(PET). Modular series-parallel structure is an effect way to realize high-power isolated bi-directional DC/DC converter, while the challenge of control complexity,testability and long developing cycle exist.A hardware-in-the-loop simulation platform is proposed and implemented on RT-LAB,which includes the physical device of the modular isolated bi-directional DC/DC converter and its control part.The system is optimized with RT-LAB control and online tuning function. The input-series-output-parallel DC/DC converter voltage and current equalization control strategy is realized.The results show that the hardware simulation platform is an effective method in studying the modular DC/DC converter system.
电力电子变压器(PET)具有电压变换、潮流控制和故障隔离等功能, 是未来智能配电网的重要电气设备[1].PET通常具有三级结构, 包括高压侧的模块化多电平变流器(Modular Multilevel Converter, MMC)、中间级隔离型双向DC/DC变换器和低压侧逆变器[2].由于PET的容量较大, 中间级的DC/DC变换器设计尤为关键, 为降低难度, 通常采用模块化串并联结构.目前, 针对大容量模块化DC/DC变换器的研究大多处于电路拓扑、仿真验证和原理样机阶段, 因此其控制算法并不成熟[3].由于隔离型双向DC/DC变换器拓扑结构复杂, 开关器件多, 通常采用数字信号处理器(DSP)和现场可编程门阵列(FPGA)进行控制, 不仅编写程序耗费时间, 而且无法实现在线参数调整.多个模块组成系统后, 设计和调试的复杂性进一步提高, 给控制系统的设计和验证带来很大的挑战.
RT-LAB实时仿真系统具有计算精度高、实时性强和稳定性好等优点, 已在国内外被广泛应用[4].文献[5]搭建了基于RT-LAB的3 MW风电变流器硬件在环仿真平台, 结果表明:该平台所用控制算法对实际变流器同样适用.文献[6]利用RT-LAB半实物仿真平台验证了MMC的控制算法, 结果表明:该平台是研究MMC的一种有效手段.文献[7]设计了基于RT-LAB的多端直流输电实验平台, 实验结果表明:该系统能够实现多端系统的稳定运行.
为缩短研发周期, 本文作者设计了基于RT-LAB实时仿真平台的模块化隔离型双向DC/DC变换器硬件在环仿真系统, 以此来完成控制算法的开发.并在该半实物仿真平台上完成了两台DC/DC变换器输入串联输出并联(ISOP)的稳态和动态实验, 结果表明:该平台可以为模块化DC/DC变换器研究开发提供有效途径.
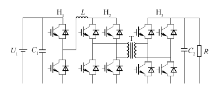
本文设计的半实物仿真平台所用模块化DC/DC变换器主电路由4台双向隔离型DC/DC变换器组成, 单台DC/DC变换器的电路拓扑如图1所示, 包括一个半桥和两个H桥.在Buck模式下, 通过控制H1桥上管的占空比调节输出电压, H2桥和H3桥都为50%占空比互补导通状态; 在Boost模式下, H1桥的上管一直开通, 下管一直关断, H2桥为50%占空比互补导通状态, H3桥通过桥臂间的移相实现升压.
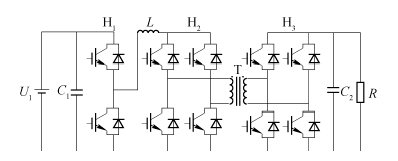 | 图1 单台DC/DC变换器拓扑Fig.1 Topology of single DC/DC converter |
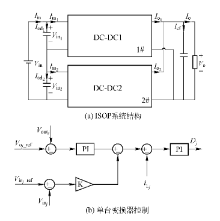
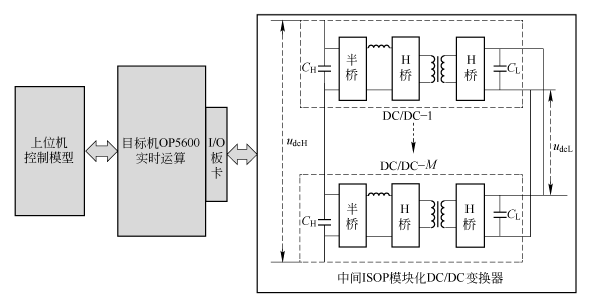
在配电网应用场合下, 由于输入电压高而输出电压低, 故本文的DC/DC变换器采用ISOP结构[8], 如图2(a)所示。对于这种连接方式的DC/DC变换器, 关键在于保证输入均压和输出均流.
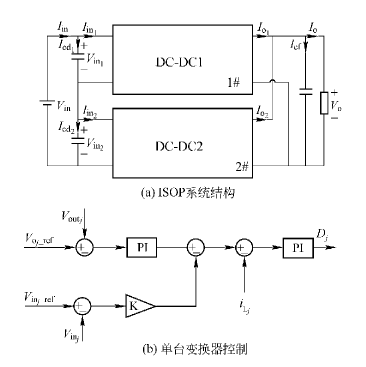 | 图2 ISOP系统及控制策略Fig.2 ISOP system and control strategy |
为实现DC/DC变换器的模块化设计, 提高系统的可靠性和冗余性。单台DC/DC变换器的控制采用基于模块本地信息的分布式控制策略.模块的控制电路分布在各个模块中, 可独立工作。如图2(b)所示, 每个模块的控制环节只采样自身的输入电压
采用传统的下垂控制, 输出电压环采用PI调节器以得到稳定的输出电压.
为分析控制策略的工作原理, 本文以图2所示的两台DC/DC变换器组成的ISOP系统为例.当系统进入稳态后, 各模块输入电压和输入电流分别满足下式为
式中:
假设某时刻均压遭到破坏, 1#模块输入电压
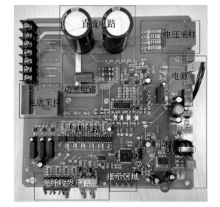
图1所示的单台隔离型DC/DC变换器拓扑中的3个桥臂, 在实际的功率电路中, 分别由3个功率子模块组成, 子模块外观如图3所示.为适应工程应用, 子模块的设计遵循集成性原则.子模块电路主要包括功率电路和控制电路, 二者通过光耦进行隔离以减少功率电路对控制电路的噪声干扰.主电路的核心单元是三菱公司的智能功率模块IPM, 再加上采样电路、吸收电路和检测电路等外围电路.控制电路的核心部分是复杂可编程逻辑器件CPLD, 还有与之配合的接口电路、驱动电路和保护电路等.控制电路主要完成对功率子模块的控制和保护功能, 包括IGBT驱动和保护、故障指示与反馈和子模块旁路等.同时, 子模块控制电路与DC/DC变换器上级控制器之间没有电气联系, 所需的控制信号通过光纤进行收发.
 | 图3 功率电路子模块Fig.3 Power circuit sub-module |
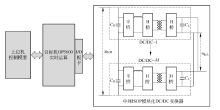
模块化隔离型双向DC/DC变换器半实物仿真平台结构如图4所示.该平台主要包括上位机、目标机和DC/DC变换器主电路.应用该平台, 可以直接将Matlab/Simulink搭建的DC/DC变换器模型用于实时仿真和控制.其中上位机安装有Matlab/Simulink和RT-LAB软件, 具有建模、在线调参和信号监控等功能.目标机是Opal-RT公司专门为半实物仿真应用而设计的基于PC的实时仿真器, 具有多核并行处理数据的能力, 可对复杂模型进行分解计算, 且配置多块数字量和模拟量输入输出板卡(I/O板卡), 为采样信号和控制信号提供输入输出通道.本文的目标机采用Redhat操作系统, 以3核分布式并行计算实现对被控对象的实时精确模拟.
 | 图4 半实物仿真平台Fig.4 Hardware-in-the-loop simulation platform |
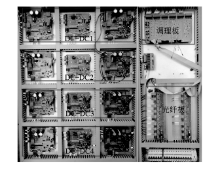
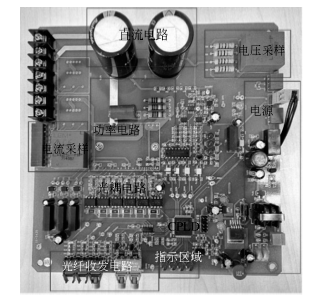
模块化DC/DC变换器硬件部分主要由信号调理电路和DC/DC变换器主电路组成, 图5为其实物图.信号调理电路主要包括调理板和光纤转接板, 其中调理板的功能是将DC/DC变换器的电流电压等采样信号转换成± 10 V之间的电压信号, 并将该信号反馈至RT-LAB用于在线监测和控制.光纤转接板对RT-LAB输出的PWM信号和控制信号进行转换, 并通过光纤发至各个功率子模块.调理板和光纤转接板通过排线与目标机的I/O板卡连接.
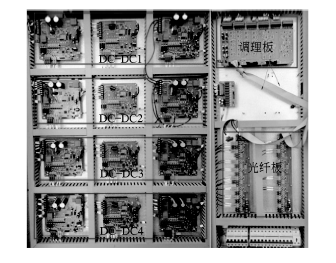 | 图5 模块化DC/DC变换器功率电路Fig.5 Modular DC/DC converter power circuit |
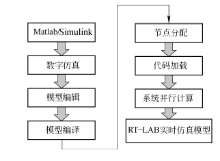
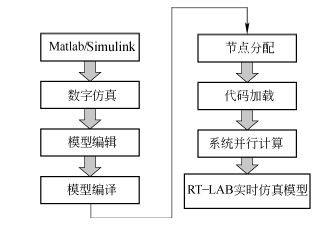
上位机安装有RT-LAB和Matlab软件, RT-LAB可与Matlab/Simulink实现无缝连接.在Simulink中搭建数学模型, 并对模型进行实时化处理, 然后对模型分割、编辑和编译, 编译生成的C代码通过以太网下载至目标机中.目标机加载代码后采用多核分布式并行计算实现DC/DC变换器在环半实物实时仿真.图6为其仿真流程图.RT-LAB对系统模型进行分割是将复杂模型划分为多个可并行执行的子系统, 即划分为模型系统、实物系统和监控系统, 对应前缀分别为SM_、SS_和SC_.SM_子系统的作用是控制模型实时计算和网络同步, 包括控制信号和I/O操作的Simulink模块.SS_子系统主要是仿真中以实物形式参与仿真部分的模型, 本文为4台隔离型双向DC/DC变换器.SC_子系统的功能是对仿真系统中的关键数据、曲线进行实时监控, 包括所有用户界面模块.
 | 图6 RT-LAB仿真流程图Fig.6 RT-LAB simulation flow chart |
在Matlab/Simulink中搭建由2台DC/DC变换器组成的ISOP型系统, 主要电路参数为:输入电压200 V, 输出电压160 V, 电感1.5 mH, 变压器原副边匝比
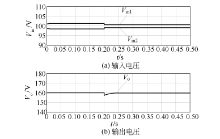
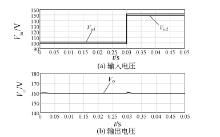
图7是负载由40 Ω 变为20 Ω 时的仿真波形.由图7可知, 当负载突变时, 两个模块的输入电压可均分, 输出电压能够稳定.但由于下垂控制的有差调节特性, 两个模块分得的电压不能完全相同.在负载为40 Ω 时,
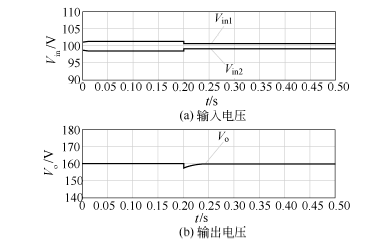 | 图7 负载突变时的输入输出电压Fig.7 Input and output voltage when the load is abrupt |
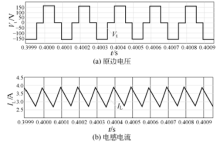
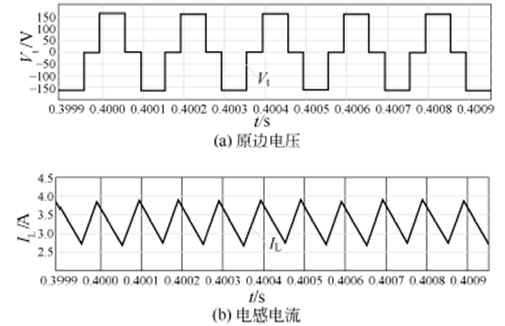 | 图8 变压器原边电压和电感电流Fig.8 Transformer primary voltage and inductor current |
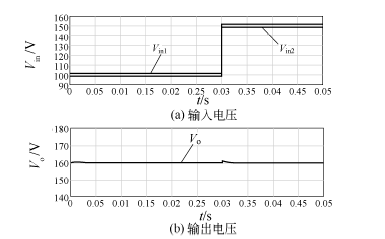 | 图9 输入电压突变时的输入输出电压Fig.9 Input and output voltage when the input voltage is abrupt |
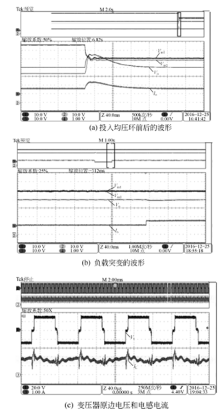
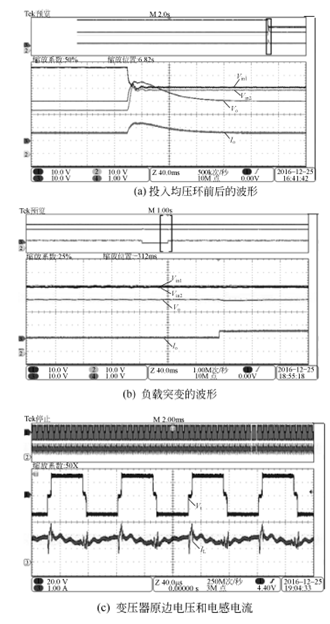
在仿真的基础上, 利用上文所述的半实物仿真平台完成了两台ISOP型DC/DC变换器的相关实验.基本实验参数为:总输入电压100 V, 输出电压30 V, 负载20 Ω , 电感1.5 mH, 变压器原副边匝比
 | 图10 实验相关波形Fig.10 Waveform of the relevant experiments |
图10(a)是投入输入均压控制环节前后的波形, 可见在投入均压环后两模块的电压均分了总电压, 且输出电压可以稳定在给定值.图10(b)是负载由20 Ω 变为10 Ω 时的实验波形.故在负载突变时能够实现输入均压, 输出电压也可以稳定.图10(c)是负载为20 Ω 时的变压器原边电压和电感电流.
针对应用于PET的模块化隔离型双向DC/DC变换器, 本文设计了基于RT-LAB的DC/DC变换器半实物仿真平台, 并在该平台上进行了两台输入串联输出并联隔离型双向DC/DC变换器的实验.
1)分析了ISOP系统的双环控制策略, 在该控制策略下, 系统可实现完全模块化的结构, 提高了系统的可靠性和冗余性.
2)阐述了所设计平台的结构及RT-LAB的仿真实现流程, 该平台包含DC/DC变换器硬件电路, 可以在线调试参数, 故能够大幅缩短研发周期, 降低实验风险系数.
3)仿真和实验结果验证了控制策略的有效性, 也表明该半实物仿真平台可以正常运行.该平台开发的控制策略对实际变换器同样适用, 是研究模块化DC/DC变换器的一种有效途径.
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|