一种可重构空间四杆机构
 , 方跃法, 房海蓉
, 方跃法, 房海蓉A reconfigurable spatial four-bar mechanism
WANG Bing1, 2 , FANG Yuefa1 , FANG Hairong1
, FANG Yuefa, FANG Hairong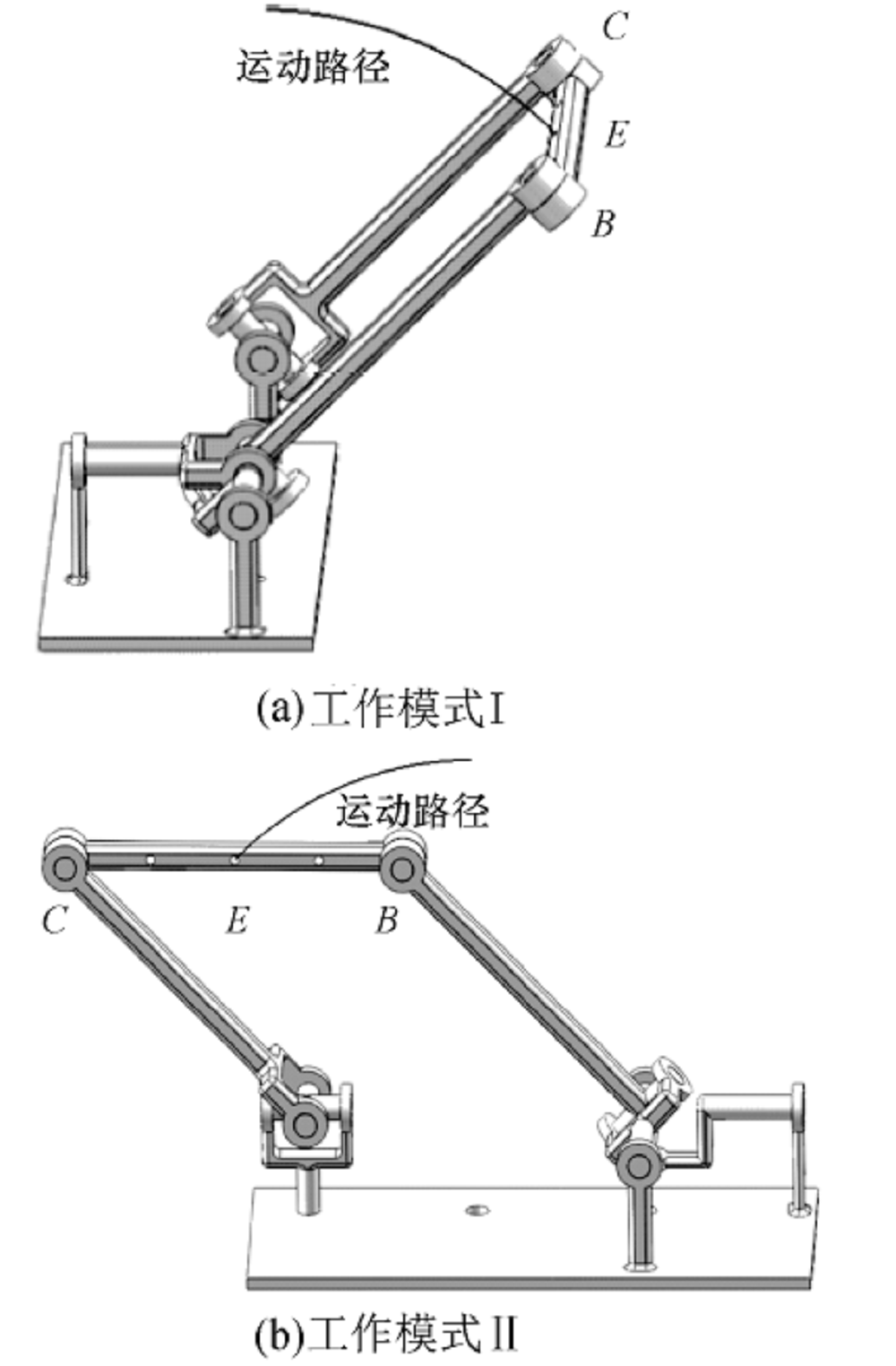
一种可重构空间四杆机构 |
|
王冰, 方跃法, 房海蓉 |
A reconfigurable spatial four-bar mechanism |
|
WANG Bing
, FANG Yuefa, FANG Hairong |
| 工作模式Ⅰ和Ⅱ的路径跟踪 |
| |