



{kind=link}
{kind=link}
{kind=link}
{kind=link}
重载汽车动力学性能多目标优化分析
[张景梅1, 2  , 崔素华
, 崔素华2 ]
, 崔素华|
|


第一作者:张景梅(1971—),女,河北鹿泉人,讲师,硕士.研究方向为车辆系统动力学与控制.email:zhjingmei@126.com.
以三轴重载汽车为例,以影响其动力学性能的悬架参数优化为目的,在随机路面激励的作用下,构建了三点虚拟激励模型,通过建立三轴重载车的六自由度模型,利用虚拟激励法得出驾驶室座椅均方根值表达式,并以加权的加速度均方根值作为平顺性的评价指标;建立汽车转弯运动力学模型,得出侧倾稳定性因数与悬架的侧倾特性和由路面随机激励所产生的动载荷之间的关系,确定以稳定性因数作为汽车侧倾运动的稳定性评价指标;将整车的95百分位四次幂合力作为道路友好性的评价指标.根据悬架刚度和阻尼与各性能评价指标之间的关系,基于Isight软件,运用遗传算法NSGA-II实现了汽车的平顺性、稳定性和道路友好性的多目标综合优化,从而得出了悬架刚度和阻尼的最佳匹配值.该思路对于多轴重载车的参数设计具有参考价值.
This paper takes three-axis heavy vehicle as an example to optimize the suspension parameters which affect the dynamic performance of automobile.Three-point virtual excitation model is constructed under the action of random road excitation.The cab seat RMS expression is solved by the six degrees of freedom model of three axle heavy truck based on virtual excitation method. And the weighted RMS acceleration is used to evaluate the ride comfort.Based on the model of turning mechanics, the relationship between the sideways stability factor and the inclination characteristics of the suspension and the dynamic load generated by random excitation of the road surface is obtained.The stability factor is used to evaluate the stability of the sideways motion of a car.The 95th percentile aggregate fourth power force taken as the evaluation index of road friendliness.According to the relationship between suspension stiffness and damping and performance evaluation index, the optimal matching value of suspension stiffness and damping is obtained by applying the genetic algorithm NSGA-II based on Isight software to achieve the multi-objective comprehensive optimization of vehicle smoothness, stability and road friendliness.Thus, the optimal matching value of suspension stiffness and damping is obtained.This idea is of great reference value to the parameters design of multi-axle load vehicle.
随着我国经济的不断发展, 货物运输行业对道路交通运输能力的需求也越来越大, 道路修筑技术及路面平整度不断得到提高, 载货汽车的性能也相应提高, 基于汽车行驶平顺性、操纵稳定性、道路友好性的参数优化研究早已得到国内外研究人员的极大关注.文献[1]提出对于复杂多体柔性系统的仿真引入有限元和模态叠加法, 应用有限差分法传感器得到了汽车平顺性参数的最优化结果; 文献[2]基于梯度信息的近似优化方法, 以及平顺性和操纵稳定性, 对车辆悬架系统参数进行了高效优化; 文献[3]通过分析车速、轴距、悬架刚度、阻尼等对路面损伤的影响, 得出道路破坏系数对于悬架刚度和阻尼极为敏感; 文献[4]针对平顺性与操纵稳定性的相互影响机理进行分析; 文献[5]兼顾行驶平顺性和道路友好性建立了载货车的悬架参数优化模型, 对悬架参数进行了优化分析; 文献[6]为改善某商用车的平顺性和道路友好性, 对悬架刚度和阻尼进行了优化; 综合国内外汽车平顺性、操纵稳定性与道路友好性及车辆性能参数优化研究现状, 尽管学者们做了大量研究, 但在车辆— 路面相互作用的研究中仍存在不足:其研究内容多为车辆平顺性或操纵稳定性与道路损伤相结合[7], 尤其是关于载货车稳定性与路面损伤相互关系的研究极为少见.且研究结果多是通过分析优化相关参数后, 平顺性或操纵稳定性得到了一定的改善, 但随着公路的高速化、重载化, 提高重载汽车整体性能, 延长汽车零部件寿命, 减少道路损伤维修费用为目的的基于道路友好性的整车动力学综合性能研究是一个值得探讨的重大课题, 因此对于汽车的主要动力学性能平顺性和稳定性兼顾道路友好性的综合性研究分析, 尤其是对与3方面性能均有密切关系的汽车悬架参数的优化分析, 在汽车产业具有重要的理论意义和工程应用价值.
在汽车动力学研究和路面动力学研究中, 路面的不平整引起车辆的振动, 车辆的振动又反作用于路面, 激励输入模型能否准确地反映实际研究的路面对汽车性能分析研究的准确性有着极其重要的影响, 目前对于路面随机激励模型的构建常用理论模拟法, 针对路面不平度的理论模拟法国内外学者进行了大量的研究和验证, 模拟方法主要有滤波白噪声法[8]、谐波叠加法[9]、AR或ARMA模型[10]等, 滤波白噪声法和谐波叠加法主要适宜单轮路面激励的时域分析, 且计算量大; AR或ARMA模型对于路面不平度的检测数据有限.因此, 建立合理的路面模型对车辆动力学性能研究至关重要.
本文作者以三轴重载车DFL1250A9为例, 分别建立其平顺性仿真半车模型和稳定性动力学分析模型, 构建B级路面的三点虚拟随机激励模型, 针对重载车在转弯工况下不同的行驶力学性能— — 平顺性和侧倾稳定性, 指出悬架参数与道路友好性评价指标、侧倾稳定性评价指标、平顺性评价指标之间的关系, 对重载汽车侧倾稳定性、平顺性基于道路友好性进行了多目标优化分析.
汽车行驶中会受到纵向、垂向和横向3个方向的输入, 各方向所表现出来的运动响应特性必然是相互作用、相互耦合的.在匀速转弯运动的工况下, 车厢产生侧倾, 对于25 t重载车的承载量主要集中于货厢, 由侧倾产生的垂向耦合运动对于驾乘人员的垂向舒适度影响可忽略不计, 故在平顺性模型建立时, 只考虑汽车的垂向运动和俯仰运动.首先对复杂的整车系统进行适当简化和假设:
1) 车辆对称于纵向对称面, 左右轮胎对应的路面不平度相同; 2) 假设路面的不平度为符合正态分布的各态历经平稳随机过程, 同侧前、中、后各个轮胎对应的路面不平度不相同, 而且存在由轴距引起的响应时滞; 3) 轮胎刚度、座椅刚度简化为线性函数; 悬架阻尼为速度的线性函数; 4) 各轮胎与地面单点接触, 无弹跳; 路面激励作用在轮胎与路面的接触中心点上.
将三轴重载汽车系统近似线性化为一半简化模型, 前、中、后轮受到3个随机输入, 受力图见图1.
图1中各参数设置如下:
根据达朗伯原理建立六自由度的振动运动微分方程
式中:
 | 图1 三轴重载车六自由度模型Fig.1 6 DOF model of three axle heavy vehicle |
利用文献[11], 由式(1)可得到频域范围内的6个频响函数的线性非齐次方程组
汽车行驶过程中的操纵稳定性主要包含纵向稳定性和侧向稳定性.纵向稳定性失控主要体现在坡道上纵向行驶时, 对于汽车的侧向稳定性, 主要表现为汽车的横向滑移或侧翻.当汽车在匀速转弯时产生侧倾运动, 车厢的倾斜使悬挂系统发生侧向变形.将整车模型简化为只有绕
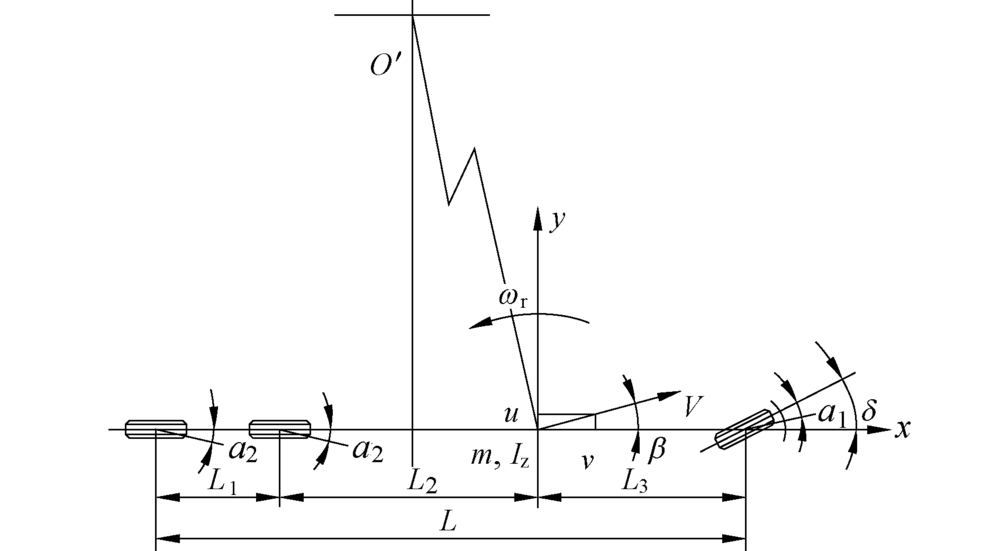 | 图2 三轴载重车二自由度模型Fig.2 2 DOF model of three axle vehicle |
图2中:
在前轮角输入下, 暂时忽略悬架的影响, 假设汽车的垂向位移、侧向位移均为零, 只考虑汽车水平的平面运动, 建立系统的微分方程如下
汽车作等速圆周运动时,
由式(3)和式(4)可求得稳定性因数为
可知轮胎的侧偏刚度
根据文献[12], 知轮胎侧偏刚度又与轮胎的垂直载荷有着密切的关系, 其关系式如下
式中:
式中:
本文中的三轴重载车, 所受路面激励属于多点激励, 由于较大的轴距导致3个轮胎所受异相位的平稳迟滞路面激励, 以B级路面工况为例, 在频域范围内建立路面模型.假定前、中、后轮受到相同相干平稳的路面激励, 建立路面的3个激励点为
可把
式中:
根据GB/T 4970— 2009《汽车平顺性试验方法》利用座椅传递给人体加速度确定对应的加权加速度均方根值作为平顺性的评价指标, 本文采用驾驶室座椅垂向加速度代替人体加速度进行分析.
以驾驶室座椅垂向振动的加权加速度均方根值
式中:
汽车的操纵稳定性涉及内容广泛, 用于表征汽车侧倾操纵稳定性的主要是汽车曲线行驶时的时频响应特性.在汽车等速转弯行驶工况下, 用稳态时的横摆角速度与前轮转动角度的比值作为汽车在等速行驶下响应的评价标准.而稳态因数的数值表征汽车的稳态响应, 通常关于汽车转弯时稳态响应的研究分析中, 只考虑汽车结构参数的影响, 在此引入了路面随机激励产生的动载影响和悬架刚度及阻尼的影响, 并得到了改进的稳定性因数, 使得对汽车稳定性研究趋于准确化.在此将式(7)中改进的稳态因数
评价道路友好性的指标主要有:动态载荷系数、道路应力因子和95百分位四次幂合力、全概率损伤及加权集合力等.动态载荷系数只能粗略反映动载荷与道路损伤的关系; 道路应力因子没有考虑到动载荷的空间重复性; 为了全面地反映车辆对道路损伤的实际情况, 提高车辆对路面损伤程度的准确度.Cole和Cebon在四次幂定律的基础上, 把各车轮动载荷的四次幂叠加[13, 14], 得到“ 95百分位四次幂合力” .故将“ 95百分位四次幂合力” 作为在道路的友好性的评价指标, 计算公式为
式中:
汽车侧倾时, 左、右轮胎的载荷及动载系数发生了变化, 左、右轮胎95百分位四次幂合力不再保持无侧倾时理论上的一致性.且汽车左、右侧轮胎产生的动载荷均由侧倾造成的载荷变化量和路面不平度导致的动载荷两部分组成.于是可分别求得汽车产生侧倾后左、右侧轮胎的95百分位四次幂合力, 则整车95百分位四次幂合力为左、右侧轮胎载荷95百分位四次幂合力之和.
由于车辆在行驶过程中速度和路面条件等因素经常变化, 优化时设定的行驶工况为:三轴重载车在转弯半径为50 m的B级弯曲路面上以30 km/h的速度匀速行驶.
为同时满足平顺性和操纵稳定性的要求, 并尽可能减轻对路面的损伤, 以函数min
由式(8)、式(11)、式(12)可知, 汽车的平顺性和侧倾稳定性, 道路友好性都与悬架参数有着密切的联系, 于是选择前、后悬架的刚度和阻尼为优化分析的设计变量, 即
1)对于货车平衡悬架的静挠度为
2)平衡悬架的阻尼系数一般选择
3)对于前悬架刚度可根据偏频确定, 前悬满载偏频范围为1. 50~2. 10 Hz[15].
4)悬架动挠度的量值在优化中也要保证, 对于载货车, 平衡悬架的动挠度
所有约束量及约束范围具体见表1.
| 表1 约束量及约束范围 Tab.1 Constraint variables and constraints |
应用Isight软件, 选择多目标遗传算法NSGA-II, 设置算法种群个体数为32, 进化100代, 交叉概率为0.9.三轴载重车平顺性、操纵稳定性及道路友好性的多目标优化平台建立.经过优化得到设计变量的Pareto最优解集(蓝色被圈区域), 以及其在目标函数空间中的映射Pareto前沿见图3和图4.
 | 图3 前悬架刚度和阻尼的Pareto最优解集Fig.3 Pareto optimal solution set for stiffness and damping of the front suspension |
由图3(a)看出, 在95百分位四次幂合力Pareto最优解对前悬架刚度的变化敏感程度较小, 随着前悬架阻尼的减小而减小, 即车辆较小的前悬架阻尼的减小引起动载荷变小, 从而车辆对于道路的损伤程度减弱.
图3(b)表明兼顾车辆的平顺性, 前悬架刚度和阻尼的Pareto最优解集在刚度大约300 000 N/m、阻尼接近20 000 N· s/m时的范围内.由图3(c)知在前悬架刚度和阻尼较大时, 稳定性因数大于0, 此时车辆具有较好的不足转向特性, 稳定性较好.
 | 图4 平衡悬架刚度和阻尼的Pareto最优解集Fig.4 Pareto optimal solution set for equilibrium suspension stiffness and damping |
图4(a)中平衡悬架刚度和阻尼的变动对于95百分位四次幂合力的影响处于不稳定状况, 平衡悬架刚度和阻尼均处于极端时, 道路所受到的破坏力较大, 所以兼顾道路的友好性, 平衡悬架的刚度和阻尼不宜最大或最小.同样平衡悬架的刚度和阻尼处于极值时, 数值越大, 车辆行驶的平顺性越差, 需要一个适中的数值.图4(c)中, 车辆侧倾时的稳定性因数在平衡悬架的刚度较大时, 数值较小, 具有较好的不足转向特性, 而对于阻尼的影响不是很明显.
根据以上分析, 基于道路的友好性, 车辆要达到较好的舒适性和侧倾稳定性, 悬架参数需要一组适中的值.表2列出了设计变量优化前后的数据.
| 表2 设计变量初始值与优化值 Tab.2 Initial value and optimal value of design variables |
表2中数据表明, 在优化之后悬架参数都有了一定的变化, 前悬架阻尼比优化前降低了3.64%, 前悬架刚度比优化前提高了7.36%; 平衡悬架的刚度比优化前提高了15.02%, 平衡悬架阻尼比优化前减小了13.89%, 这与前面对于设计变量收敛过程分析的结论相一致.
在表内优化后悬架参数的匹配下, 当道路友好性最好时, 该车的平顺性和操纵稳定性达到最佳状态.优化后目标函数的结果如表3所示.
由表3可见, 前后悬架刚度和阻尼优化匹配后, 驾驶室座椅垂向加速度均方根值降低了约7%, 内侧轮胎稳定性因数增大了约4.78%, 外侧轮胎稳定性因数增大了约4.31%, 道路友好性指标95百分位四次幂合力减小了约12.6%, 使汽车的平顺性、操纵稳定性和道路友好性均有所提高.优化后目标函数的数值与表1中预定的目标函数的约束范围均满足, 故此次优化达到了预期效果.整个优化过程与思路为实际工程中汽车设计提供参考.
| 表3 目标函数的优化比较 Tab.3 Comparison of optimization results of the objective function |
1)提出三轴重载汽车三点路面虚拟激励模型, 针对具有较大轴距的三轴轮胎上在受异相位的平稳迟滞路面激励时, 该模型的提出使平顺性和侧倾稳定性结果的复杂推导过程简单化, 该模型的建立为多轴重载车的动力学研究提供了一条捷径.
2)在重载汽车侧倾稳定性研究中, 由于载重量较大, 悬架的刚度和阻尼、路面不平度对于侧倾稳定性有着较大影响, 在悬架的侧倾力矩和轮胎侧偏刚度的计算中, 既考虑悬架的刚度和阻尼, 又引入路面随机激励所产生的动载影响, 建立了改进的三轴重载车匀速转弯行驶时的稳定性因数, 弥补了对稳定性因数的以往研究中仅仅只考虑悬架刚度的不足, 使对于车辆侧倾稳定性的分析更趋于准确化.
3)提出了将前、后悬架的刚度和阻尼作为多目标优化分析的设计参量, 对载重车的平顺性、侧倾稳定性和道路友好性三方面性能进行了综合优化的思路, 通过设计参量、优化目标函数在优化前后的结果对比, 得出了前、后悬架参数的最佳匹配, 基于道路友好性, 汽车的平顺性和侧倾稳定性得到了较好的改善.本文的优化分析思路对多轴载货汽车的性能研究和参数设计、路面的改进、提高车辆行驶的安全性等方面具有重要的理论参考和工程应用价值.
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|