











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
轻型抓取机器人的优化设计与路径规划
[郭盛 , 于智远, 曲海波]
, 于智远, 曲海波]
, 于智远, 曲海波]
|
|


第一作者:郭盛(1972—),男,内蒙古呼和浩特人,教授,博士,博士生导师.研究方向为机器人机构学.email:shguo@bjtu.edu.cn
针对一种轻型抓取机器人,对其进行了构型优化设计和相关工作路径的研究.在各臂旋转到同一条直线上时,以对各个关节的转动惯量最小为优化目标,得出轻型抓取机器人各臂的最优臂长,并针对抓取时的稳定性进行了设计. 运用三次多项式对机器人的点到点运动和有中间点的运动进行了轨迹规划,得到了各个关节的位移和角速度方程,并用实例进行了计算. 利用Matlab Robotics工具箱对轨迹规划的结果进行了验证.
The paper does the research of optimize design and trajectory planning on light grasping robot. The optimization objective is to minimize the moment of inertia that the arm exerts on every joint when all of the arms rotate to a line. The optimal length of each arms of the grasping robot could be obtained. The grasping ability and grasping stability of the grasping robot are optimized. The trajectory planning has been done in the circumstances of movement of point-to-point and movement with middle point. The functions of angular velocity and angular acceleration could be achieved. The correctness of the trajectory planning has been validated with the Matlab Robotics Toolbox.
抓取机器人作为工业生产线上最常见的机器人, 是工件抓取、搬运、装配及码垛的主要工具.抓取操作就是要在极短的时间内将目标物体从一个位置搬运到另一个位置, 某些情况下还要同时完成对目标物体的姿态的调整.
对于轻型抓取机器人, 国内外许多学者已经做过许多研究, 轻型抓取机器人在设计、制造方面都有了很大的突破.在SCARA机器人运动学和动力学方面, 王科等[1]提出了以旋量、李群李代数为基础进行SCARA机器人的正解、逆解和雅克比矩阵的求解方法.并在此基础上, 基于旋量理论, 结合了拉格朗日法和牛顿-欧拉法的优点, 建立了SCARA机器人的动力学模型, 并进行了求解, 得到了SCARA机器人的动力学方程参数. 针对SCARA机器人的轨迹规划问题, 赵登步等[2]提出一种基于时滞指数函数的速度轨迹规划方法.通过与S形速度轨迹规划方法的对比发现其计算量较小, 产生的轨迹连续平滑.左富勇等[3]利用Matlab Robotics工具箱, 对SCARA机器人进行了轨迹规划与仿真.Pajak[4]提出了一种针对末端执行器振动的无碰撞的移动机械臂的点对点轨迹规划方法, 在减小末端执行器振动的同时提高了定位精度.上述轨迹规划的方法均存在一定的局限性, 导致了总的规划时间较长, 精度较差等.
针对SCARA机器人优化设计问题, Mashagbeh[5]基于MapleSim软件实现了对SCARA机器人阻尼和刚度的模拟, 对控制算法进行验证, 使机器人在投入使用前就能对其表现进行评估.Jean-Francois[6]提出了一种新的设计SCARA机器人的方法, 这种方法考虑了机器人的几何和关节的重复性, 在保证工作空间和传感器成本不变的情况下, 使其获得了更好的可重复性.上述研究主要从定位精度、控制算法方面对SCARA机器人进行了优化, 对SCARA机器人的杆长尺寸考虑较少.
本文作者在给定的轻型抓取机器人的基础上首先建立了优化目标函数, 得到了大臂和小臂的最优化尺寸.其次, 设计了轻型抓取机器人的工作平台, 提高了其抓取的稳定性.然后, 利用三次多项式对机器人进行了轨迹规划.最后, 利用Matlab Robotics工具箱对规划的结果进行了验证.
本文所设计的轻型抓取机器人是由4个运动关节组成的一种水平搬运的机械手臂, 如图1所示. 3个转动关节轴线互相平行, 实现平面内定位和定向, 此外, 附加一个移动关节, 实现末端垂直运动.
 | 图1 轻型抓取机器人机构图Fig.1 Structure of grasping robot |
由图1可知当抓取机器人的大臂臂长l1和小臂臂长l2展开呈一条直线的时候, 机器人对各个关节的转动惯量达到了最大值. 如果以最大的角加速度运动, 根据T=J· β (其中:T表示转矩; J表示转动惯量; β 表示角加速度)可以得出, 此时电机的转矩最大, 为了保证最大角加速度不变的同时减小电机的最大转矩, 就要保证大臂和小臂在这个位置的时候机器人对各关节的转动惯量最小[7].
根据平行轴定理, 可以得到大臂和小臂绕关节1和关节2的转动惯量为
式中:
这是一个多目标最优化问题, 在此采用线性加权和法将多目标的优化问题转化为单目标的优化问题.因为J1和J2的数量级相同, 取加权因子ω i=
满足
小臂末端在X-Y平面内与原点距离的平方为
因机器人结构限制, 小臂无法实现全周转动, 小臂运动范围为± 135° 且机器人底座半径为200 mm, 则
当θ 2∈ [-135° , 135° ]时, 可以得到
定义轻型抓取机器人工作空间性能指标为h=hmax-hmin, 要求抓取机器人工作空间大于500mm, 如图2所示, 则臂长应满足:
 | 图2 优化约束条件的确定Fig.2 Determination of the optimal constraint conditions |
由此可得此优化设计的数学模型的约束条件为
目标函数可行域如图3所示.
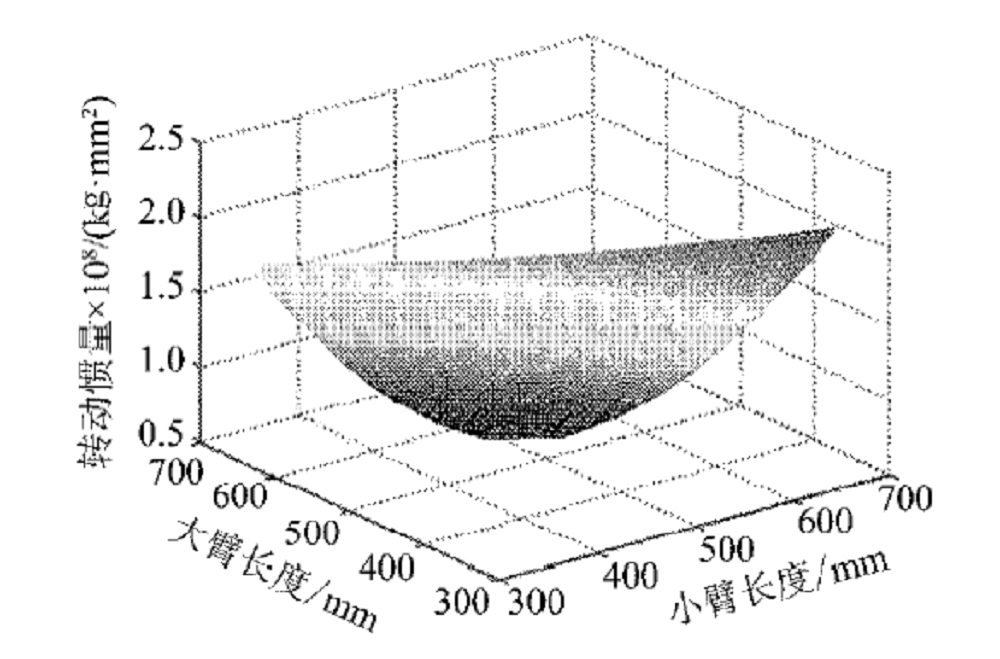 | 图3 目标函数可行域Fig.3 Feasible region of the objective function |
由式(2)、式(8)利用Matlab优化工具箱可以求出最优解为:l1=410 mm, l2=390 mm.
为了使抓取机器人在平台上工作时能够更加稳定, 可以通过调节两边的支撑柱的长度来调整整体的中心位置, 使其零力矩点落在支撑面内, 增加整体结构的稳定性[8].同时, 行走机构可以使抓取机器人在非工作状态时自由移动, 具有更好的灵活性. 行走机构结构如图4所示.
 | 图4 行走机构结构图Fig.4 Structure of the moving mechanism |
对于设计的机器人要执行空间内点对点的抓取任务, 最简单的抓取路径是直线, 但要使抓取机器人末端走直线, 需同时协调控制2个电机, 这加大了对电机的控制难度, 而且走直线运动不平稳, 需要急转急停, 易磨损清扫臂零部件, 降低清扫臂的使用寿命.为了更好的完成抓取工作, 要对抓取机器人进行轨迹规划, 在满足机器人运动学的条件下, 获得连续、平滑的轨迹, 本文采用三次多项式进行轨迹规划[9].
关节空间的轨迹规划适用于抓取机器人手腕从空间的某一个位置运动到目标位置, 路径中无障碍物, 属于点到点的运动.运动要求机器人各关节在初始时刻和结束时刻的关节角速度和角加速度均为0.
首先建立两个关节的位移与时间三次多项式
对式(9)求一阶导可以得到角速度与时间的函数, 求二阶导可以得到角加速度与时间的函数关系
通常, 操作臂需要通过某些中间点来避开障碍, 最终达到目标位置.与单目标点的情形类似, 中间点通常是用工具坐标系相对于工作台坐标的期望位姿来确定的, 应用逆运动学把中间点转换成一组期望的关节角.然后考虑每个关节求出平滑连接每个中间点的三次多项式.
建立两个关节在两个时间段内的位移与时间的三次多项式. 再根据已知的初始时刻关节1和关节2的关节角、中间时刻的关节1和关节2的关节角及结束时刻的关节1和关节2的关节角, 可以分别确定两个关节的位移与时间的三次多项式的系数.
假设轻型抓取抓取机器人末端操作手从初始位置A(θ 1a=0° , θ 2a=0° )运动到结束位置B(θ 1b=100° , θ 2b=90° ), 分别对点对点运动和有中间点的运动进行规划.
设点对点运动的运动时间t=2.5 s.
基于给定的关节角数值, 可以唯一确定两个关节的三次多项式, 将约束条件代入式(9)和式(10), 可得到关节1和关节2的运动函数如图5所示.
 | 图5 AB段关节1和关节2的位移Fig.5 Displacement of each joint diagram in AB segment |
对式(11)求一阶导数可以得到各个关节速度的函数如图6所示.
 | 图6 AB段关节1和关节2的角速度Fig.6 Angular velocity of each joint diagram in AB segment |
具有中间点的运动时, 在中间位置O点时, 关节1和关节2的关节角(θ 1o=45° , θ 2o=80° ), 起始位置到中间位置运动时间t1=1.5 s, 从中间位置到结束位置运动时间t2=1.5 s.
基于给定的关节角数值可以唯一确定两个关节的运动函数如图7所示.
 | 图7 AOB段关节1和关节2的位移Fig.7 Displacement of each joint diagram in AOB segment |
关节1从A运动到B:
关节1从O运动到B:
关节2从A运动到O:
关节2从O运动到B:
对式(13)、式 (14) 、式 (15)和式 (16)求一阶导数可以得到各个关节速度的函数如图8所示.
 | 图8 AOB段关节1和关节2的角速度Fig.8 Angular velocity of each joint diagram in AOB segment |
关节1从A运动到O:
关节1从O运动到B:
关节2从A运动到O:
关节2从O运动到B:
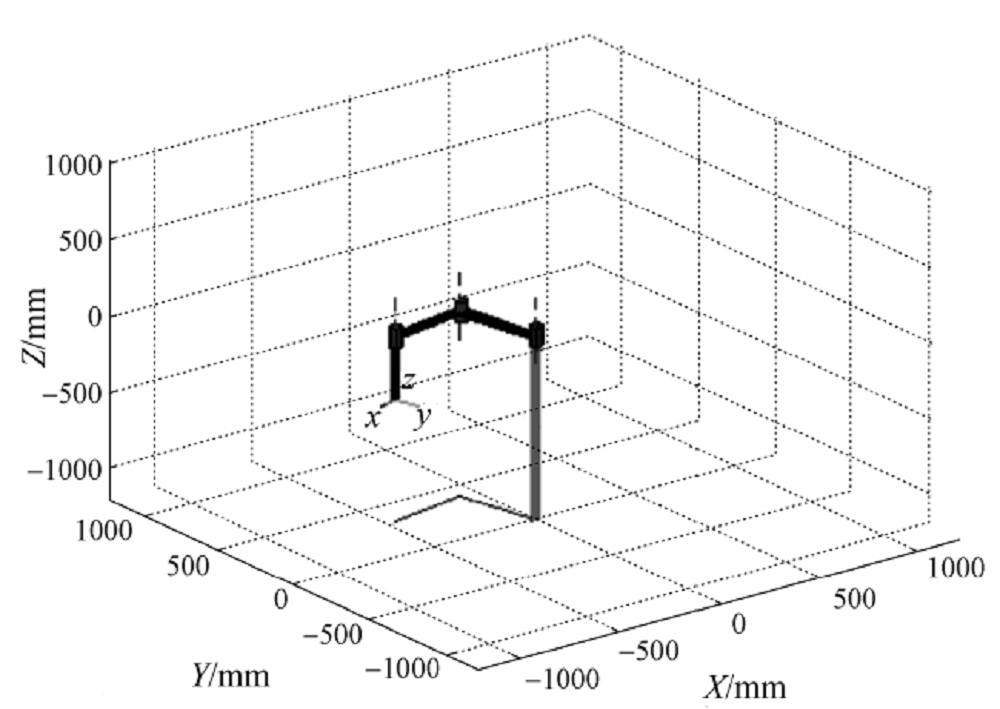
用Matlab Robotics工具箱对本文所设计的抓取取机器人进行运动轨迹仿真, 首先应建立相应的机器人对象如图9所示, 程序为
 | 图9 抓取机器人Fig.9 Grasping robot based in Matlab |
构建完成后, 可通过drivebot函数来驱动抓取机器人的运动, 通过控制滑块的位置可以实现关节的转动和移动[10].驱动界面如图10所示.
 | 图10 抓取机器人关节驱动图Fig.10 Joint diriver of grasping robot in Matlab |
采用Matlab Robotics工具箱的[q, qd, qdd]=jtraj(qa, ab, t)命令对抓取机器人进行仿真.对于无障碍的点对点运动, jtraj函数采用的是7次多项式插值, 默认初始和终止速度为0.
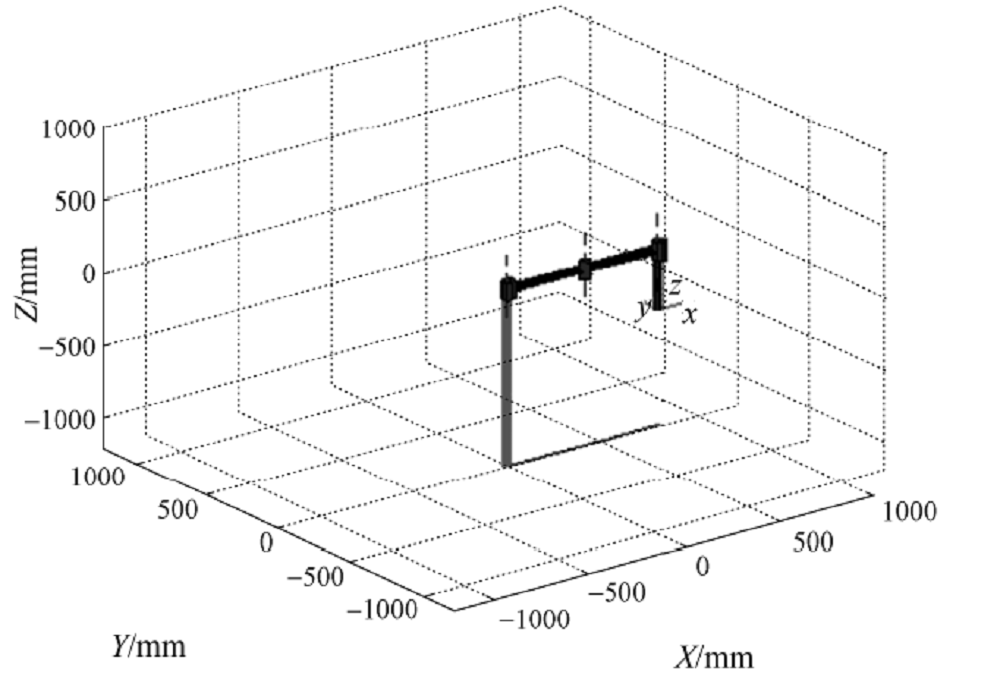
关节1和关节2的位移、角速度和角加速度曲线如图11所示, 机器人在终止时刻的位置如图12所示.
 | 图11 AB段各关节的位移、角速度、加速度图Fig.11 Displacement angular velocity and angularacceleration of each joint diagram in AB segment |
 | 图12 AB段终止时刻抓取机器人的位置Fig.12 Position of grasping robot at the end of the AB segment |
由图11(b)可以看出, 关节1和 2的角速度为一条光滑且连续的曲线, 并且起始结束时刻的角速度均为0.因此, AB段轨迹整体运行平稳.图12显示了在终止时刻, 抓取机器人的位置.
1) 对所研究的抓取机器人进行了杆长的最优化设计, 使机器人对各个关节的转动惯量最小, 并设计了轻型抓取机器人的工作平台以提高其抓取稳定性.
2) 对机器人手臂进行了轨迹规划, 抓取机器人臂各关节速度、位置均变化连续且平缓, 无振荡现象, 避免了运动过程中的关节失控.
3) 利用Matlab软件的Robotics工具箱对轻型抓取机器人进行了轨迹规划, 验证了基于三次多项式的轻型抓取机器人轨迹规划的正确性.
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|